医療福祉ロボティクス・メカトロニクス研究者
岩田 浩康(いわた ひろやす)/理工学術院教授
グローバルロボットアカデミア研究所所長
2020年東京オリンピックへ「スポーツ技能習熟支援システム」
 「人の技能と心身機能を拡張する人間支援ロボットテクノロジー(RT)」をコンセプトに多彩な研究活動に取り組む岩田浩康教授。シリーズ第3回は、東京オリンピックをも見据えたスポーツの技能習熟を支援するシステム開発のお話を伺います。
「人の技能と心身機能を拡張する人間支援ロボットテクノロジー(RT)」をコンセプトに多彩な研究活動に取り組む岩田浩康教授。シリーズ第3回は、東京オリンピックをも見据えたスポーツの技能習熟を支援するシステム開発のお話を伺います。
人の技能を高めるロボットテクノロジー
どのスポーツでも、トップアスリートの動きには美しさを感じます。その理由は、動きにムダがなく、理に適っているからでしょう。実際、スポーツがうまくなるためには、合理的なフォームを身につけることが必要です。例えば、バスケットボールでフリースローの得点率を高めたいとします。ところが初心者の場合、そもそもどのようにボールを投げればよいのかがわかりません。フリースローは、4つの動作に分解できます。まず、ボールを両手で持ち(hold)、持った腕を振り上げて静止させます(set)。そして、利き腕でボールを押し出し(release)、投げ出します(follow threw)。フリースローの軌道は、ボールの初速、矢状面(人の前後方向の動きを表す面)におけるボールの仰角、前額面(左右方向の動きを表す面)におけるボールの左右のブレ角、ボールが手から離れる瞬間の地面からの高さなどに影響されます。
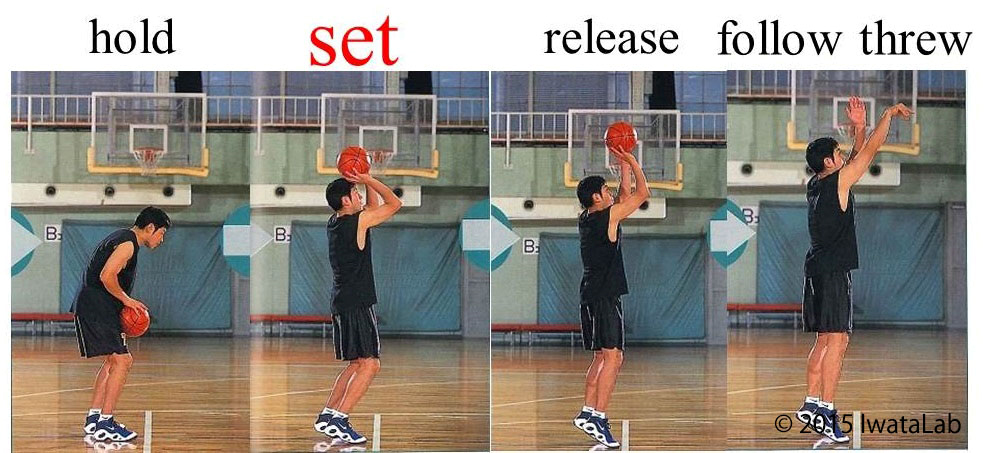
写真:フリースローの一連の流れ(出典:岩田研究室)
ゴールにボールを入れるためには、腕を振り上げる高さ、ボールを投げる角度と速度などを適切に調節しなければなりません。これらの変数がどのように組み合わされば、ボールがうまくゴールに入るのか。その理想的な答えは、数学的に解析して求めることができます。そこで解析によって得られた理想のフォームを、練習時に身につけられるような技術を開発しました。スポーツの何らかの技能を高めたい時に、自分では気がつかないポイントや偏り、自分の足りない部分を指摘して矯正するシステムです。
フォームのバラツキを抑える
バスケットボールのフリースローは一例で、おそらくどんなスポーツにも理想のフォームがあるはずです。そのフォームと自分の現状の動きが、どれぐらいかけ離れているかを自覚できれば、動きを訂正し、正しいフォームを身につけることができます。セットフォーム矯正デバイスは、理想のフォームを一人でマスターするためのデバイスです。
例えばフリースローなら重要なのは「set」のときの姿勢で、矢状面と前額面の肩関節の角度が、常に一定の範囲内に入るように訓練します。具体的には3軸の加速度センサと2軸の角速度センサを併用した装置を使います。これによりset状態での体の姿勢が適切な状態かどうかを自動判定し、適切でない場合には音で通知します。プレイヤーは、音が鳴らないよう姿勢を変更し、そのときの体性感覚に繰り返し注意を向ける訓練を行うことで、セットフォーム矯正デバイスや音がなくとも、理想的なフォームを再現できるようになるのです。
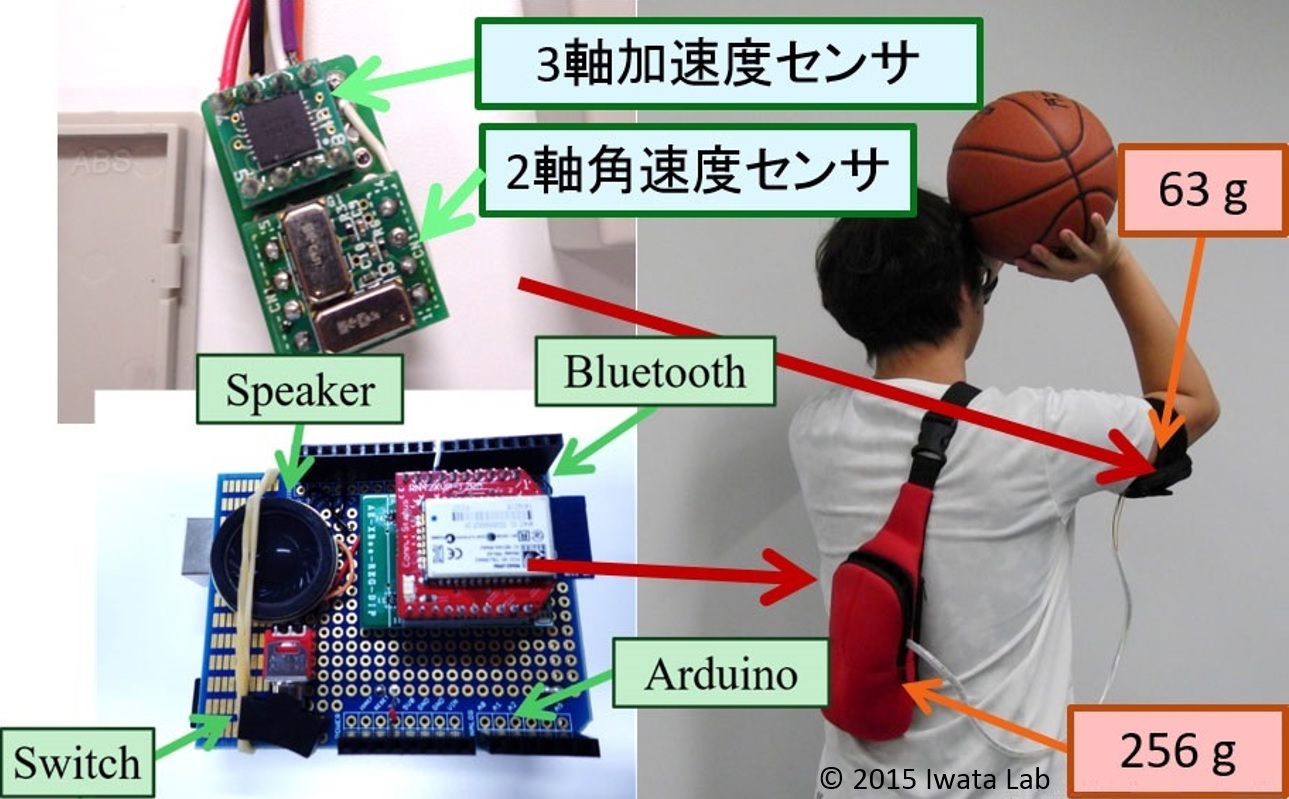
写真:フリースローにおけるセットフォーム矯正デバイス(出典:岩田研究室)

写真:フリースロー矯正デバイスを装着している状態。音が鳴り体の姿勢が適切か自動判定してくれる
こうしたバイオフィードバックで正しいフォームを身につけるシステムは、バスケットボールに限らず他のスポーツにも応用可能です。例えばバレーボールでは、ボールレシーバーは、ボールを正確にセッターに返すようレシーブしなければなりません。その際にポイントとなるのが、両腕の肘の角度の作り方です。そこで、プレイヤーがHMD(Head Mounted Display:ゴーグル型モニター)を装着し、VR(Virtual Reality:仮想現実)を使ってレシーブ技能を練習するシステムを開発することにしました。画面内のバレーコートの中央ネット際に立つアタッカーから打ち出されるボールを実際にレシーブ姿勢をとって拾う仕組みです。レシーブ板に内蔵されたセンサで、そのレシーブ姿勢がボールの飛んできた方向やセッターの位置に対して適切かどうかをモニタリングし、どのように姿勢を変えればよいかを画面内で指示してくれます。これだとボールを使わなくてもよいので、家の中など限られたスペースでも一人で練習できます。

写真: VR(バーチャルリアリティ)と身体センサを装着した様子。専用のゴーグルをかけると机上PCの ような画面が目の前いっぱいに広がる

写真:バット・スイング高速化支援デバイス。体姿勢-聴覚バイオフィードバックなど一連の運動連鎖を支援
テクノロジーを統合してソリューションに繋ぐ
セットフォーム矯正デバイスが効果をもたらすのは、現時点では競技を始めた高校生レベルに留まります。けれども今後、トッププレイヤーの動きを精密に解析し微妙な動きの違いを判断できるようセンサ数を増やして測定するパラメータを追加すれば、超一流選手の練習にも応用できる可能性があります。
目標は、2020年の東京オリンピックに出場する日本選手の力になることです。開催国として、日本が50個ぐらいの金メダルを取れるようサポートしたいと考えています。夢のような話かもしれません。けれども「できたらいいな」とか「あったら便利だな」を実現するのが、ものづくりの楽しみであり、社会的意義でもあります。世の中の役に立つものを作りたい。これは私がずっと持ち続けている想いで、研究の原動力なのです。
☞1回目配信はこちら
☞2回目配信はこちら
☞4回目配信はこちら
プロフィール
 岩田 浩康(いわた ひろやす)
岩田 浩康(いわた ひろやす)
2002年早稲田大学大学院理工学研究科機械工学専攻博士課程修了、博士(工学)、2004年同大学講師、2006年同大学准教授、2014年同大学創造理工学部総合機械工学科教授、2015年同大学グローバルロボットアカデミア研究所所長、日本機械学会(代議員),日本コンピュータ外科学会(評議員)、日本バイオメカニズム学会(幹事)、日本ロボット学会(評議員)、日本バイオフィードバック学会(理事),計測自動制御学会(代議員),IEEE,EMBS等に所属。人間を支援するロボット技術(Robot Technology;RT)をキーワードに、リハビリ支援RT、医療支援RT、スポーツ習熟支援RT、知能化建機ロボット、新素材応用RT等、先端的研究を数多く手がけ、国内外から高い評価を得ている。詳しくは岩田研究室
主な研究業績
- M.OKAMOTO,M.KUROTOBI,S.TAKEOKA,J.SUGANO,E.IWASE,H.IWATA,T.FUJIE,“Sandwich fixation of electronic elements using free-standing elastomeric nanosheets for low-temperature device processes” J.Mater.Chem.C,Feb,2017
- H.HAYATA,M.OKAMOTO,S.TAKEOKA,E.IWASE,T.FUJIE,H.IWATA,“Printed high-frequency RF identification antenna on ultrathin polymer film by simple production process for soft-surface adhesive device” Jpn.J.Appl.Phys.,vol.56,no.5S2,pp.05EC01,May,2017
- Ito K, Sugano S, Takeuchi R, Nakamura K, Iwata H,“Usability and performance of a wearable tele-echography robot for focused assessment of trauma using sonography” Medical Engineering and Physics,vol.35,no.2,p165-171,2013
- Iwata H, Sugano S,“Human-robot-contact-state identification based on tactile recognition” IEEE Transactions on Industrial Electronics,vol.52,no.6,p1468-1477,2005
- Iwata H, Sugano S,“Design of human symbiotic robot TWENDY-ONE”Proceedings-IEEE International Conference on Robotics and Automation,p580-586,2009






