垂直はしごから滑落を回避し既存より12倍速く昇降可能な新・脚型ロボット、誕生
内閣府のタフ・ロボティクス・チャレンジによる災害対応ロボット、新しいアルゴリズムの開発へ
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所 諭)の一環として、早稲田大学理工学術院創造理工学部総合機械工学科 高西淳夫(たかにしあつお)教授、早稲田大学高等研究所 橋本健二(はしもとけんじ)助教、三菱重工業株式会社らは、脚型ロボットのための2点支持による垂直はしご昇降が可能なアルゴリズムを開発し、1肢ずつ動かしていた3点支持に比べ、12倍速い垂直はしご昇降を実現しました。
プラントや発電所内を移動するためには垂直はしごを使うことは必須であり、災害が発生した非常時だけでなく、平常時にも老朽インフラ/プラントの保守点検・災害予防のためにこの災害対応ロボットが運用できます。
これまで垂直はしごの昇降は、滑落防止のため4肢のうち3つを固定した、3点支持のみでしか実現されておらず、この方法では、昇降にかかる時間が極めて長いという課題がありました。また、人によるはしごへの取り付け作業が必要となっており、はしごへの取り付きから昇降という一連の動作の実現には至っていませんでした。今回、脚型ロボットを多質点モデルで近似し、全身の各質点の運動の影響を考慮し、把持点での反力を活用する新たなアルゴリズムを開発することで、左手左足あるいは右手右足の2点支持による垂直はしご昇降を可能としました。本アルゴリズムにより3点支持に比べ、12倍速い垂直はしご昇降を実現しました。また、本アルゴリズムを応用することで、垂直はしごへの取り付き動作も実現しました。
本成果は垂直はしご上で機体が滑落しないための安定判別規範にもなります。そのため、災害時に垂直はしごが変形したようなタフな環境においても、滑落しないような運動生成が可能になり、さらに垂直はしご昇降中に外乱が加わっても把持点での反力を制御することで転倒が回避できるようになることが期待されます。
ポイント
- 全身の各質点の運動と把持点での反力を適切に制御し、2点支持においても滑落が回避可能な垂直はしご昇降アルゴリズムを開発
- 2肢を同時に次の桟に移動させる際にも機体の滑落が回避可能になり、1肢ずつ動かしていた3点支持に比べ、12倍速い垂直はしご昇降を実現
- 垂直はしご昇降アルゴリズムを応用することで、垂直はしごへの取り付き動作を実現
研究の背景と経緯
地震や洪水、噴火などの大災害や老朽化に伴うインフラ事故が相次いで発生しており、そのような極限環境下で人間の代わりに作業が可能なロボットへの期待が高まっています。そこで、災害対応ロボットのあり方について、早稲田大学理工学術院の高西淳夫教授、早稲田大学高等研究所の橋本健二助教らと三菱重工業株式会社は2014年から共同研究を実施しており、4肢を共通構成とする脚型ロボットを提案し、プロトタイプ機を開発してきました(図1参照)。平地・不整地などの多くの環境はほふく(4肢と胴体を接地)で移動し、胴体部を積極的に路面に接触させることで、高い安定性を保つことができます。さらに、4肢を共通構成とすることで、4足歩行や2足歩行などの多様な移動方式に切り替え可能です。肢には冗長性を持たせるため7自由度、体幹には1自由度を配置し、肢のすべての関節において約180~360°の大きな可動角を持たせ、手先・足先の形状はフック形状としています。
極限環境を移動するためには、瓦礫などの不整地の踏破、階段やはしごの昇降、狭隘部の通過などの高い移動能力が求められます。これまでは、平常時・災害時に関わらず踏破しなければならない「垂直はしご」に注目して研究を進めてきました。垂直はしごは、車輪型やクローラ型ロボットでは昇降が難しく、また米国防高等研究計画局(DARPA)主催の災害対応ロボットの競技会「DARPA Robotics Challenge」においても、構想当初は垂直はしごの昇降が想定されていましたが、難易度が高過ぎると判断され実際には行われませんでした。
これまでに1肢ずつを順番に動かす3点支持でのはしご昇降を実現してきましたが、1桟の昇降に120秒を要し、動作が遅いものでした。また、垂直はしごへの取り付き動作が実現できていませんでした。
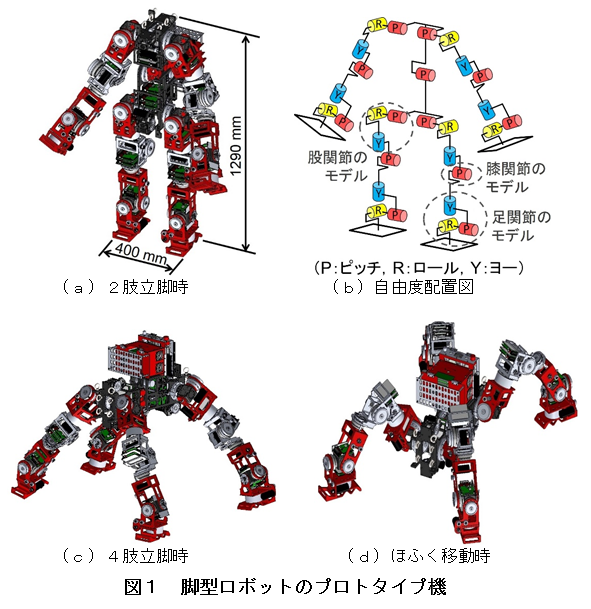
1肢7自由度、体幹1自由度の合計29自由度で構成され、2肢立脚時の全長が1290mm、重量110kg。各手先・足先には6軸力覚センサを持つ。
研究の内容
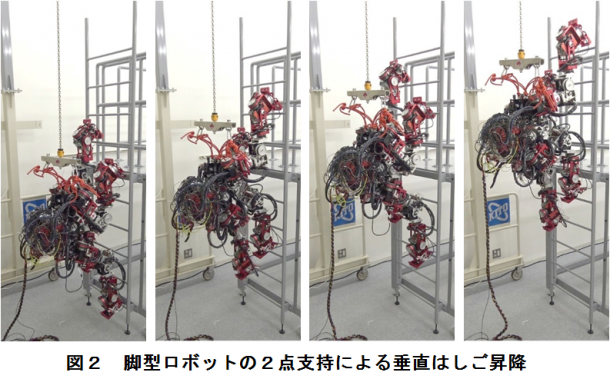
今回、本研究開発グループは脚型ロボットのための2点支持による垂直はしご昇降アルゴリズムを考案し、脚型ロボットのプロトタイプ機において2点支持でのはしご昇降を実現しました(図2参照)。これまでの3点支持によるはしご昇降では、1肢ずつ次の桟に移動させ、最後に胴体を持ち上げるという5つの動作で1桟を昇降していましたが、2点支持を採用することではしご昇降動作数を減らすことができ、昇降速度を12倍に速くすることができました。
2点支持時は、2ヶ所の把持点を結んだ稜線周りに機体が回転し、垂直はしごから滑落する危険性が高くなります。垂直はしご上で機体を安定させるためには、稜線周りのモーメントを小さくしなければなりませんが、全身の各質点の動きと把持点での反力を適切に制御することで滑落を防ぐアルゴリズムを考案しました。
従来の研究では、機体を単質点でモデル化しているものや、転倒を防ぐために把持点での反力を活用していないものなどがありますが、本研究で使用する機体は等身大サイズのため、各肢の運動による影響が無視できません。そこで、全身の各質点の運動の影響を考慮するために脚型ロボットを多質点モデルで近似し(図3参照)、把持点での反力を活用することで垂直はしごからの滑落を防ぐことができるようになりました。
このアルゴリズムを応用することで、2点支持による垂直はしご昇降だけでなく、これまで実現できていなかった床面から垂直はしごへの取り付き動作も可能になりました(図4参照)。これまでに垂直はしごを昇り切り、上階の歩行路に移動することを実現しており、本研究成果により垂直はしごへの取り付きから昇り切りまでの一連の動作が可能になりました。
左腕・左脚、右腕・右脚を交互に繰り出し、2点支持による垂直はしご昇降を実現。1桟の昇降時間は10秒。垂直はしごの支柱の間隔は600mm、桟の間隔は250mmで、どちらもJIS規格内の寸法。
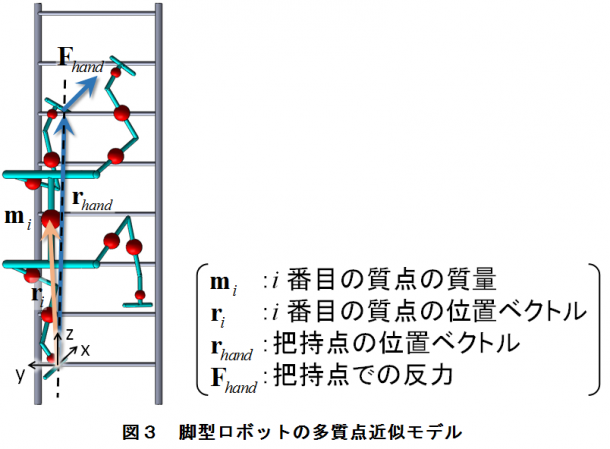
各肢を3つの質点で近似し、全身を合計13つの質点で近似。
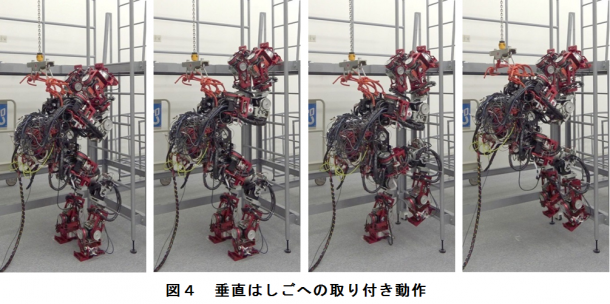
床面に2肢立脚している状態から、両腕をはしごの桟に掛け、次に右脚、左脚の順に繰り出し、垂直はしごへの取り付き動作を実現。
今後の展開
本研究開発成果によって、2点支持の状態においても垂直はしごの昇降が可能になりました。脚型ロボットのプロトタイプ機はモータ出力を大きく減速しているため、2点支持においても1桟の昇降時間は約10秒ですが、モータ出力を上げることによって1桟を約4秒で昇降可能になる見込みです。また、この垂直はしご昇降アルゴリズムは、はしご上で機体が滑落しないための安定判別規範にもなります。そのため、災害時に垂直はしごが変形したようなタフな環境においても、滑落しないような運動生成が可能になり、さらに垂直はしご昇降中に機体に外乱が加わっても把持点での反力を制御することで転倒が回避できるようになることが期待されます。垂直はしごの変形などの認識については、ImPACTタフ・ロボティクス・チャレンジ内の極限画像処理グループの研究成果を脚型ロボットに搭載する予定です。
また、脚型ロボットのプロトタイプ機は、手先・足先をフック形状としていますが、それでは工具などを使用した作業ができません。今後は、ImPACTタフ・ロボティクス・チャレンジ内で開発されているハンドとの統合を検討し、移動能力だけではなく作業能力も備えた脚型ロボットを開発予定です。
田所 諭ImPACTプログラム・マネージャーのコメント
 ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
これまで、原子力プラントなどの点検や災害対応のさまざまなロボットが開発されてきましたが、はしごの昇降を伴う作業は困難とされてきました。
設備内壁やトンネルの外壁に設けられた垂直はしごを登って点検や工事を行うことは、プラントなどにおける災害予防点検においては必須です。本研究開発は、昇降時に十分な安定余裕を確保し、滑落を回避しながら、タフで高速に、垂直はしご移動ができる、という非連続イノベーションを達成したところに意義があります。脚型ロボットが人間よりも速くプラントなどの高所によじ登り、危険箇所の非破壊検査や作業を実施できるために必要な基盤技術であることから、今後の実用化に向けた展開が期待されます。