
- Featured Article
人の心に寄り添うロボットを
早稲田大学×日本医科大学の共同研究プロジェクト
Mon 31 Mar 25
早稲田大学×日本医科大学の共同研究プロジェクト
Mon 31 Mar 25
早稲田大学×日本医科大学の共同研究プロジェクト
早稲田大学と日本医科大学は、2009年に包括協定を締結し、2020年には実質的な研究連携への合意、本学附属校・系属校との高大接続連携に関する協定など、関係を強化しています。共同研究に参画する理工学術院の澤田秀之教授は、二つのプロジェクトを推進中です。本記事では、人々のウェルビーイングに貢献する澤田教授の研究内容を紹介します。
医療現場の課題に、早稲田の工学的技術を応用する
日本医科大学と早稲田大学は、研究と教育の両輪で連携を進めている。プロジェクトに参画する研究者の一人が、理工学術院の澤田教授だ。
「両大学は合同シンポジウムを定期的に開催しており、各研究者の発表をもとに、医療現場のニーズと工学のシーズが共有されます。最先端の医学に、早稲田大学の技術力が加われば、医療の質やウェルビーイングの向上に貢献できるでしょう。私は日本医科大学に工学的手法を提案し、二つの研究プロジェクトを進めています」
澤田秀之教授(理工学術院)
ロボティクスやヒューマンインタフェース、情報制御工学など、幅広い領域で研究活動を進める澤田教授。注力分野の一つは「人間や生体に近いロボット」だと、独創的なアプローチ方法を語る。
「一言で表すならば “柔らかいロボット” です。例えば、ヒトの触覚を司るのは皮膚の下にある神経系の受容器ですが、実際に硬い物体を『硬い』と感じるのは、柔らかい皮膚が変形するためです。そのため、硬い材質のロボットにセンサーを装着しても、同じような皮膚感覚は得られません。このような生体と工学の乖離を埋め、実際の機能にロボットやAIを近づけることが、私の主たる研究領域となります」
末梢神経障害にアプローチする、触覚ディスプレイ
こうした専門性を生かすべく、日本医科大学との共同プロジェクトとしてスタートさせたのが、「温度と微小振動刺激を利用した化学療法誘発性末梢神経障害性疼痛の診断法の開発」だ。
「私たちがこれまでに研究開発を進めてきた、様々な触覚感覚を提示できるデバイスを利用し、末梢神経障害などを診断するシステムを構築するのが、本プロジェクトの目的です。そもそも触覚の領域は未知な部分が多く、痺れや痛み、触覚感覚の異常の程度も患者の主観に依存します。そのため医療機関も、問診を中心とした定性的な診断にとどまり、対処方法を精緻化できません。感覚麻痺や痛みを評価するシステムを構築したいと、プロジェクトを始動しました」
澤田教授が開発を進めているのが、目に見えない微振動を皮膚に伝えて様々な触覚感覚を提示する「触覚ディスプレイ」だ。デバイスに手のひらをあてると皮膚を通して微小な振動パターンが伝わる仕組みで、この振動は強度や移動方向が変化する。デバイス自体が動くのではなく、手を置くだけで感覚に直接刺激が加わっているように感じる点が特徴だ。
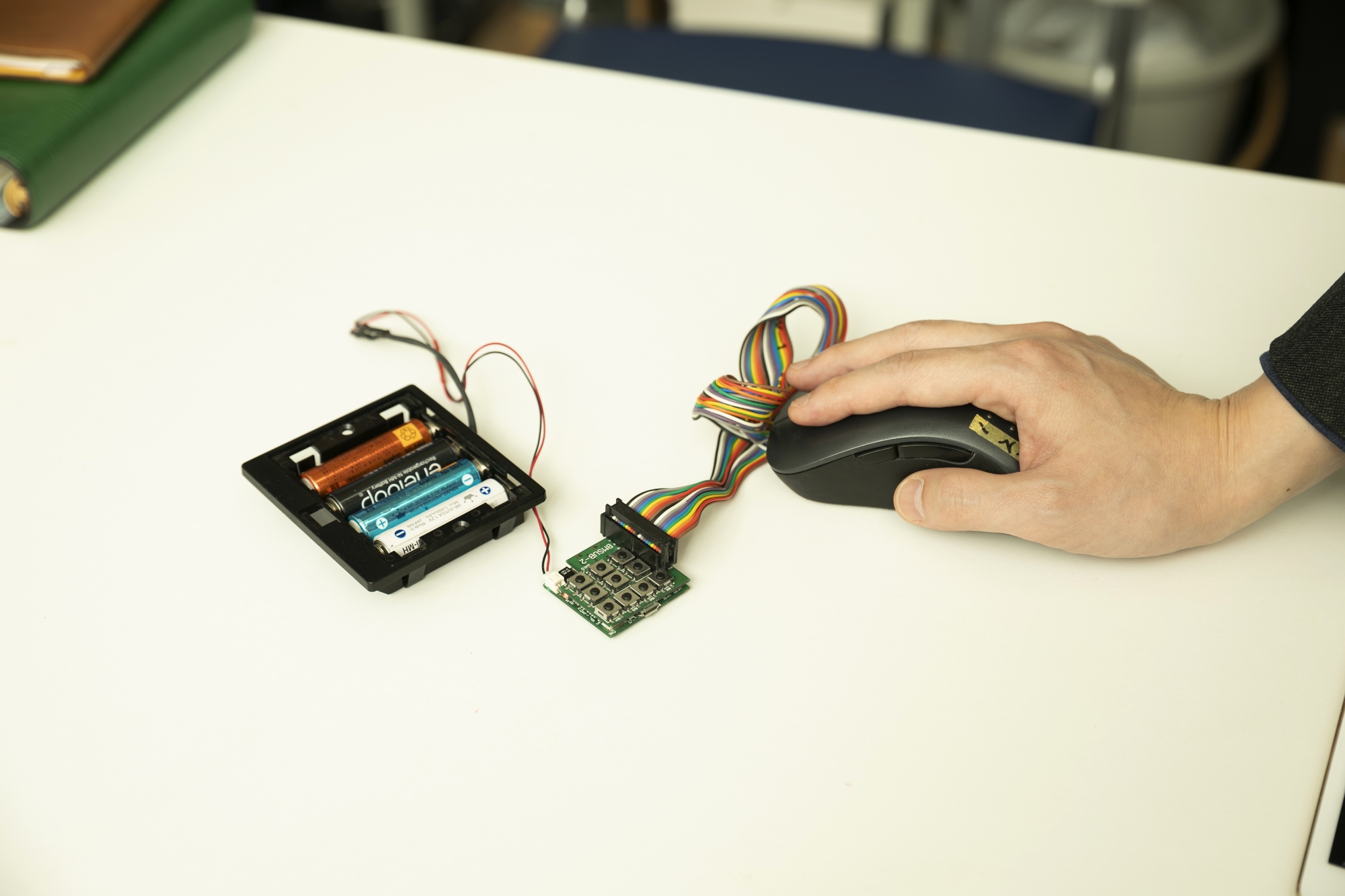
触覚ディスプレイ。写真右のデバイスを手のひらで覆うと、手の中を物体が移動するような感覚が伝わる。毎秒数千回の振動が可能。電光掲示板で文字などが連続的に流れて見える視覚の「仮現運動」を、触覚でも提示できることを実証し、これを応用しているという
「つまり、微小振動アクチュエータによって皮膚に与えられる進藤パターンを、皮膚下に存在する触覚受容器が感知し、これが神経系を通って脳に伝わり、触覚感覚として知覚されます。皮膚下の数十マイクロメートル程度の触覚受容器を、目に見えないほどの小さな振動によって刺激し、その振動の大きさや周波数を完全にコントロールできるデバイスは、これまで医療現場にありませんでした。触覚ディスプレイを使い、患者さんがどの振動を感じるか、あるいは感じないかを測定すれば、麻痺度や触覚感覚の異常の度合いがわかります」
では、同技術はどのようにして現場で活用されるのか。本プロジェクトでは、日本医科大学の外科医と共同で、抗がん剤投与で生じる神経障害にアプローチするという。現在は臨床試験を進めている段階だ。
「がんの手術後に抗がん剤を投与すると、副作用として痺れや麻痺などの神経障害が生じることが、医療現場で課題視されてきました。抗がん剤と神経障害はトレードオフの関係であり、医師は精緻な診断によって両者を微調整していく必要があります。触覚ディスプレイで定量的な診断ができれば、抗がん剤の投与を適正化できるでしょう。また、デバイスを定期健康診断などで活用することで、例えば糖尿病に起因する触覚感覚の低下もその初期段階で検知でき、予防医療にも役立てられると見込んでいます」
人の心に寄り添うロボットを目指す、Bionic Finger
澤田教授が日本医科大学と進めるもう一つのプロジェクトが、「ヒトの手の解剖学的構造を再現したBionic Fingerの開発」だ。この「Bionic Finger」も、“生体に近いロボット”の一つである。
「一般的なロボットハンドは、モータを内蔵し、これらを制御することで動いています。しかし実際のヒトを動かしているのは筋肉。筋肉は原則として引く方向へのみ動き、また柔軟性もあるため、モータでは十分に再現できない動作も多いのです。特に指は、筋肉や腱、骨といった内部組織の複雑な相互作用によって動作している上に、触覚をセンシングしながら即座に動作することも可能です。生体のように柔軟かつ器用に動作するロボットをつくるためには、人と同様の内外部の組織と構造、そして触覚受容器と同様な感覚を実装することが必要となります」
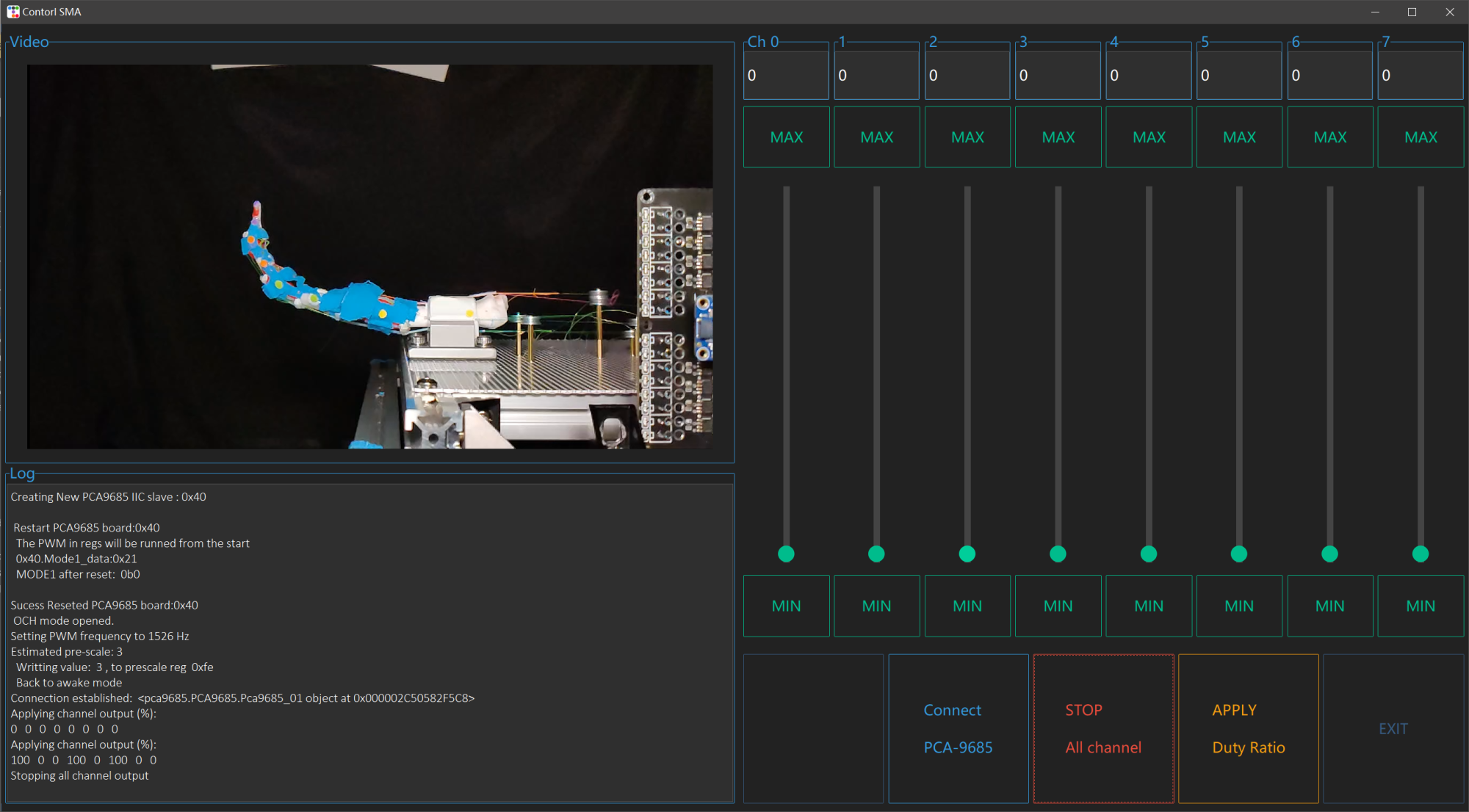
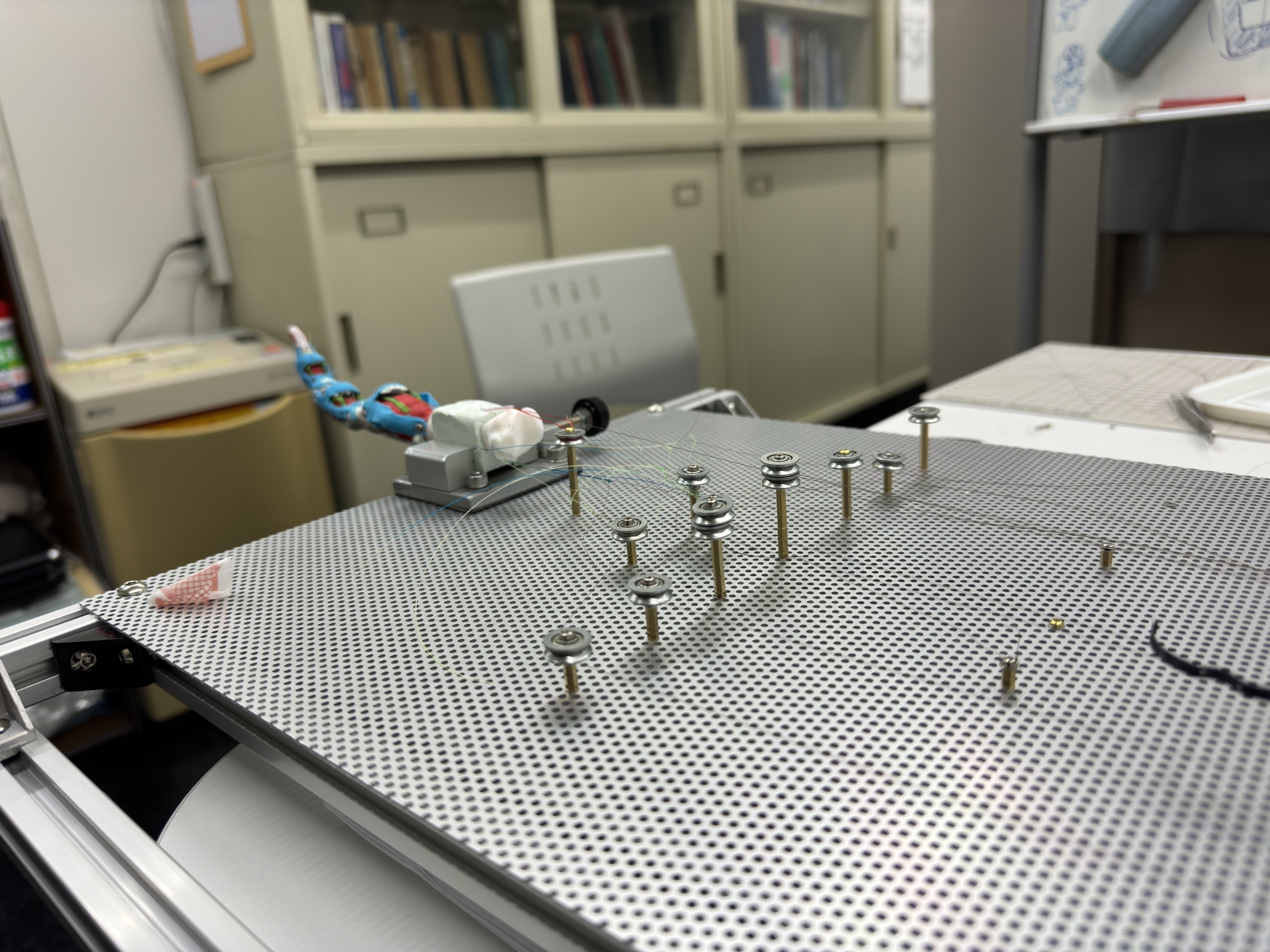
Bionic Fingerの開発風景。指のロボットに複数の人工筋肉アクチュエータをつなぎ、複雑な動きを再現しようとしている
本プロジェクトは、ヒトの動作を忠実に再現することに意義がある。「心的な領域に寄り添うロボットを開発したい」と、澤田教授は抱負を語る。
「モノを大量かつ迅速に運ぶロボットの開発は発展しています。しかし、そのロボットが人間に寄り添うかというと、疑問を抱く方は多いでしょう。ペットロボットと遊んでみたり、ビデオ会議ツールで恋人や家族と対話をしたりと、さまざまなテクノロジーがコミュニケーションにも寄与してきましたが、触れ合う質感や雰囲気、一緒にいる安心感は、十分ではありません。人間は、“実用的な機能を超えた何か”を欲する存在であり、ロボットはそこに近づく必要があると考えています。そのためにはまず、動作の高精度化が必要です。生体に近いロボットが開発されれば、被災地での心的ケアなど、社会課題の解決にも役立てられるでしょう」
さまざまな領域に工学の知見を応用しようとする澤田教授。その原動力はどこにあるのだろうか。
「過去100年間で、人類のライフスタイルは目まぐるしく変化しました。他方、人間が本当に必要としている互助や安心は、100年前の社会の方が充実していたのではないでしょうか。このギャップの原因は、おそらく効率化による副作用です。だからこそ、効率化の賜物であるロボットを、再び本来の人間性に役立てたい。特に現代は、紛争や災害など、孤立によって精神的な危険に陥るケースが増えています。そうした状況でいかにテクノロジーが機能するか。私は生物や生体の構造と機能を基にした新しいロボットの提案をしていきたいと考えています」

撮影=西早稲田キャンパス 55号館
- LINK
