ImPACTタフ・ロボティクス・チャレンジの脚型プラットフォーム、誕生
災害現場を模擬した崩壊の危険性のあるがれき上での移動を可能に
https://www.youtube.com/watch?v=OYAqfXjPIck
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所 諭)の一環として、早稲田大学理工学術院創造理工学部総合機械工学科 高西淳夫(たかにしあつお)教授、早稲田大学高等研究所 橋本健二(はしもとけんじ)助教、三菱重工業株式会社らは、脚型ロボットのプラットフォームとなるWAREC-1(WAseda REsCuer-No.1)を開発しました。これは4つの肢を持つ脚型ロボットで、1肢7自由度の全28自由度を持ち、垂直はしご昇降だけでなく、4脚歩行や2脚歩行も可能なように設計されています。2肢立脚時の全高は1690mm、体重は約150kgです。分散制御システムを採用することで省配線化を実現し、中空構造のアクチュエータユニットを開発することで各肢内部への配線の収納も実現しました。
災害現場では崩壊の危険性のあるがれき上を移動しなければなりませんが、4脚歩行や2脚歩行で移動するためには、足先を着地する路面の形状を視覚センサなどで正確に測定しなければならず、がれき上などの路面が崩壊するような環境での移動は困難でした。さらに、4脚歩行や2脚歩行という移動方式は、重心高さが高いため、路面の状態が正確に測定できたとしても、転倒を完全に防ぐことが難しいという課題がありました。
今回、腹ばい移動も可能な頑健なプラットフォームWAREC-1を開発し、胴体部を路面に積極的に接触させることで、崩壊の危険性のあるがれき上での移動を実現しました。
ポイント
- ImPACTタフ・ロボティクス・チャレンジの脚型ロボットのプラットフォームとなるWAREC-1(WAseda REsCuer-No.1)を開発
- 中空構造のアクチュエータユニットを開発することで各肢内部への配線の収納を実現
- 胴体部を積極的に接地させることにより崩壊の危険性のあるがれき上での移動を実現
研究の背景と経緯
地震や洪水、噴火などの大災害や老朽化に伴うインフラ事故が相次いで発生しており、そのような極限環境下で人間の代わりに作業が可能なロボットへの期待が高まっています。そこで、災害対応ロボットのあり方について、早稲田大学理工学術院の高西淳夫教授、早稲田大学高等研究所の橋本健二助教らと三菱重工業株式会社は2014年から共同研究を実施しており、4肢を共通構成とする脚型ロボットを提案してきました。これは、垂直はしごも昇降可能なもので、従来の4脚歩行や2脚歩行だけでなく、崩壊の危険性のあるがれき上では胴体部も積極的に接地させて移動するという高い移動能力を実現するものです。
このコンセプトを実機で実現するためには、路面に接地させても壊れない頑健な構造をロボットが持たなければなりませんでした。さらに、がれき上を移動時に、ロボットの関節外に配線が露出していると配線が断線する恐れがあるため、配線を関節内部に収納しなければならないなどのハードウェア設計上の多くの課題がありました。
研究の内容
ImPACTタフ・ロボティクス・チャレンジの脚型ロボットのプラットフォームとなるWAREC-1(WAseda REsCuer-No.1)を開発しました(図1参照)。

WAREC-1は、1肢7自由度の全28自由度を持ち、2肢立脚時の全高は1690mm、体重は約150kgであり、図1に示す通りに各肢内部に配線は収納された脚型ロボットであり、胴体部を接地させる腹ばい移動だけでなく、4脚歩行や2脚歩行、垂直はしご昇降も可能です(図2参照)。胴体構造については、腹ばい移動時に路面と接触させても故障しないように頑健な構造とし、胴体接地時に路面からの滑落を防ぐために凹形状となっています。

国内の等身大の脚型ロボットに注目すると、その駆動機構にはハウジング付きモータを使用する例が多いですが、本研究開発グループは、今回新たに、ビルトイン可能なロータ、ステータの状態からなるフレームレスモータの採用に成功しました。従来のハウジング付きモータでは、駆動機構への採用は容易なものの、その出力は200W程度と小さく、ロボットの高出力化を図る場合には、1つの関節を2つのモータで駆動するダブルモータ駆動方式を採用することが一般的でした。しかし、この方式では1つの関節を1つのモータで駆動するよりも体積的に不利になるという課題がありました。
今回成功したフレームレスモータ採用のポイントは下記の通りです。
- モータと減速機のフレームを共通化できるため小型化、軽量化が可能
- 中空構造や各種センサ内蔵などの自由度の高い設計が可能
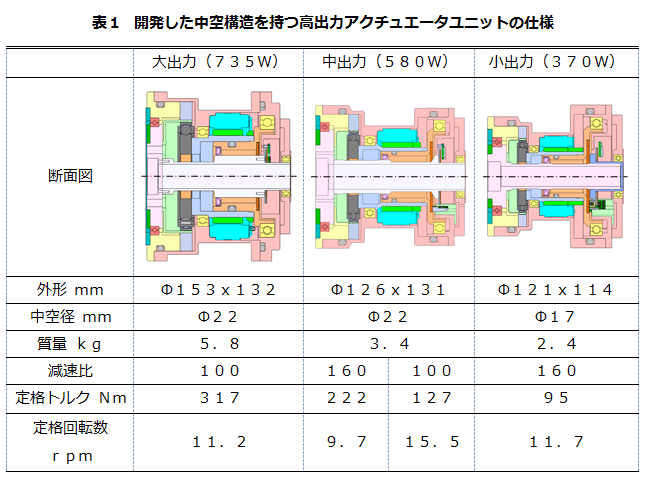
本研究開発グループでは、モータのフレームに要求される高い加工精度と、モータとフレームの接着も自身の手で行わなければならないという高度な設計技術を確立することで、フレームレスモータを研究室内で組立て可能とする環境を構築しました。その結果、中空構造などの自由度の高い設計を自ら行うことを可能とし、3つの出力(735W、580W、370W)で、かつ、中空構造により配線を内部に収納できるアクチュエータユニットの開発に成功しました(表1参照)。さらに、省配線化のために、分散制御システムと小型分散モータドライバを採用しました。分散制御システムは、国際的に標準化されたCAN(Controller Area Network)を使用しています。
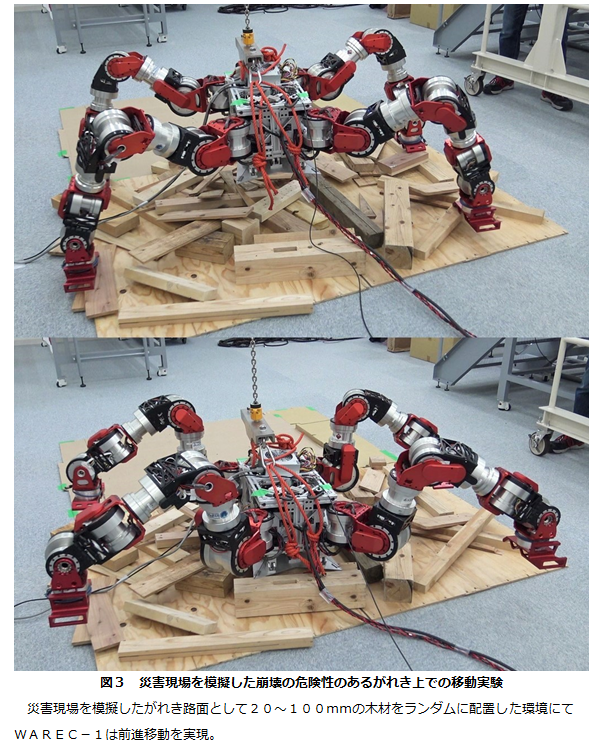
以上のように、本研究開発では、中空構造を持つ高出力アクチュエータユニットを開発し、それを各関節に適用することで、各肢内部に配線を収納し、腹ばい移動も可能な頑健なプラットフォームWAREC-1を開発しました。さらに、災害現場を模擬したがれき路面として20~100mmの木材をランダムに配置した環境を用意し、この路面上をWAREC-1で腹ばい移動させたところ、崩壊の危険性のあるがれき上での移動を実現しました(図3参照)。
今後の展開
本研究開発では、中空・高出力アクチュエータユニットを駆動機構に持ち、腹ばい移動も可能な頑健な脚型ロボットのプラットフォームWAREC-1を開発しました。現段階では、ロボットの駆動電源は外部から供給していますが、今後はバッテリを搭載します。また、本研究開発成果により、胴体部を積極的に路面に接触させることで、崩壊の危険性のあるがれき上での移動が可能になりましたが、今後は腹ばい移動時の各肢の運肢方法について研究していきます。さらに、環境認識センサや手先・足先の力センサの情報も使用していくことで、手足を前方に繰り出す際に外界環境と接触するような環境にも適応させる予定です。
なお、WAREC-1はImPACTタフ・ロボティクス・チャレンジの脚型ロボットのプラットフォームであり、今後、ImPACTタフ・ロボティクス・チャレンジ内で開発されている遠隔操作システムや、画像処理、音響処理などの技術の本プラットフォームへの統合を進めます。また、WAREC-1では、手先・足先をフック形状としていますが、それでは工具などを使用した作業ができないため、ImPACTタフ・ロボティクス・チャレンジ内で開発されているハンドとの統合を検討し、移動能力だけではなく作業能力も備えた脚型ロボットを開発していく予定です。
田所諭 ImPACTプログラム・マネージャーのコメント
 ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
災害現場でロボットが活躍するためには、刻々と変化する未知の様々な極限環境に適応しながら、安定して移動できることが必須です。今回新たに開発したWAREC−1は、4脚歩行、2脚歩行、腹ばい移動など、状況にあわせたより柔軟な脚移動が可能であるところに特徴があります。
従来から不整地移動によく用いられてきたクローラー(無限軌道)では、地面への力のかけ方を個別に調整したり、崩壊に合わせて制御することは不可能であり、瓦礫の斜面のように、形状が複雑でかつ崩れやすいような状況の移動では、失敗する確率をある一定水準以下に下げることが原理的に不可能でした。また、従来型の通常の脚移動では、接地点の形状や状態やその変化を正確に認識することが必須であり、また、接地点の崩壊に対する迅速な判断と対応が必要であることから、現状のロボット知能のタフさの限界と考えられてきました。腹ばいに代表されるような超安定姿勢を保ちながらの移動形態は、その壁を打破するために有効と考えられますが、まだ脚ロボットでの研究実施例はほとんどありません。そのため、本プロジェクトが世界に先駆けて研究を開始することの意義は大きく、今後の発展が期待されます。
本成果は、以下の事業・研究プロジェクトによって得られました。






