超軽量化ロボット実現へ 従来比約90%の減量に成功
超高分子量ポリエチレン・ギヤの搭載でカーボンニュートラル社会の実現へ貢献
発表のポイント
ロボットに搭載する、超高分子量ポリエチレン(UHMW-PE)製の軽量・低摩擦なギヤを開発しました。
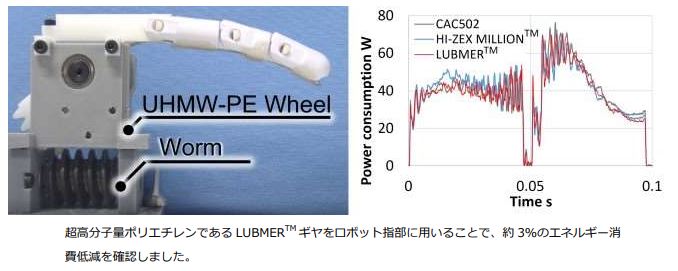
従来の金属ギヤに替えて新しく開発したギヤを搭載するだけで、約3%のロボット駆動時のエネルギー消費低減と、約89%の軽量化を達成しました。
さらにオイルレス駆動によるメンテナンスフリー、低騒音効果などももたらされ、地球にも人にも優しく、社会に受け入れられやすいロボットの実現に期待が持たれています。
早稲田大学(以下、早大)理工学術院総合研究所の大谷拓也(おおたにたくや)次席研究員ならびに同大理工学術院の高西淳夫(たかにしあつお)教授らの研究グループは、株式会社hide kasuga 1896 および、三井化学株式会社との共同研究により、超高分子量ポリエチレン(UHMW-PE)製*1の軽量・低摩擦なギヤを開発しました。さらに、従来のギヤに替えてこのギヤをロボットの指部に搭載するだけで、従来の金属ギヤに比べて約3%のエネルギー消費低減、約89%の軽量化を達成することができました。この開発により、さまざまなロボットのエネルギー消費低減につながり、カーボンニュートラル社会実現への一助となることが期待されています。
本研究成果は世界最大の学術研究団体であり、全世界に40万人を超える会員を有する米国電子電気学会(IEEE)発行の『IEEE access』に2022年9月19日(月)(現地時間)に掲載されました。
論文名:Energy Efficiency Improvement of a Robotic Finger with Ultra High Molecular Weight Polyethylene Gear
また、2022年12月16日(金)に株式会社hide kasuga 1896が保有する東京・表参道の「gallery de kasuga」にて、研究成果の展示イベントを行います。
(1) これまでの研究で分かっていたこと(科学史的・歴史的な背景)
早大は、故加藤一郎教授*2がヒト形ロボットの研究開発を始めて以来、世界初の本格的人間形知能ロボットWABOT-1や2足歩行ロボットWABIAN-2などさまざまなロボットを開発し、世界のロボット研究をリードしてきました。近年、様々な場面でロボットの実用化が進み始めている一方で、世界的に深刻化するエネルギー不足の問題は、ロボット分野においても研究開発における喫緊の課題として注目されています。
電気エネルギーで動くロボットの多くは、当然ながらエネルギーが不足すると動けません。また、ロボットのエネルギー効率が低いと、エネルギーが無駄に消費されてしまいます。ロボット動作時のエネルギー消費のほとんどは、ロボットコントローラーの消費電力よりもモータ電力であり、特にロボットが大型化・重量化するほど増加します。そのため、ロボット自体の消費エネルギーを削減するためには、ロボット自体の軽量化が重要です。ロボットのフレーム部分には自重を支える強度が必要であるため、大きなロボットには従来、金属材料が用いられてきました。そこで、近年では軽量化を目的に、金属材料の代替として高強度なプラスチックや炭素繊維強化プラスチックが使用されはじめています。
さらに最近では、フレーム部の他に、ロボットの関節を駆動するギヤの軽量化も提案されています。これらの提案では、強度を維持したまま軽量化する設計手法が提示されていますが、抜本的な軽量化にはギヤそのものに軽量な材料を使用することが重要であると考えられています。そのため、軽量で成形しやすいという利点を生かし、様々な機械分野でプラスチック歯車の利用が広がっています。
(2) 今回の研究で新たに実現しようとしたこと、明らかになったこと
ロボットの消費エネルギーを低減する方法として、ロボットの軽量化設計だけでなく、駆動部の摩擦によるエネルギー消費も重要な要素です。そこで、本研究グループは軽量、高強度、摺動性に優れるという特徴を持つ超高分子量ポリエチレン(UHMW-PE)に着目しました。UHMW-PEとは、一般的に平均分子量が1.0×106以上と非常に高く、通常のポリエチレンや他のエンジニアリングプラスチックよりも優れた摺動特性、耐摩耗性、衝撃強度を示すポリエチレンの一種です。
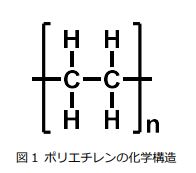
ポリエチレンの化学構造は、図1に示すように、エチレンの繰り返し構造です。UHMW-PEの場合、この繰り返し構造が非常に長く、分子形状は分岐の少ない直鎖状です。この直鎖状分子鎖は、C-H結合の抵抗や表面自由エネルギーが小さい形状であるため、分子間力が小さくなります。また、長い分子鎖は多くの絡まりを作るため、応力に対して高い強度を持ちます。これにより、UHMW-PEは優れた摺動特性や耐摩耗性を示します。さらに、UHMW-PEは、炭素原子と水素原子のみからなる化学構造のため、軽量で耐薬品性に優れています。これらの特性から、UHMW-PEは高負荷や高速回転のロボットの歯車に適しており、軽量で摺動性に優れていることから、これまで利用されてきたエンジニアリングプラスチックの素材と比べて、消費エネルギーの低減が期待できます。
そこで本研究では、UHMW-PE製のギヤをロボットに搭載することで、駆動時の消費エネルギーを低減することを目指しました。そのため、従来の金属ギヤに対して、UHMW-PEのなかでも最先端のUHMW-PE 材料であり、低摩擦などの特徴を持つ三井化学株式会社から供給された HI-ZEX MILLIONTM (0.93 g/cm3) と LUBMERTM (0.97 g/cm3) をそれぞれ用いてギヤを作成しました。UHMW-PEは溶融粘度が高く、射出成形や押出成形が困難なため、圧縮成形や切断成形が一般的です。
HI-ZEX MILLIONTMは代表的な粉末状のUHMW-PEであり優れた摺動特性や耐摩耗性を有しており、ブロック材の切削加工によってギヤを製作しました。
LUBMERTM は射出成形や押出成形が可能な特殊なUHMW-PE であり、UHMW-PE の中でも優れた摺動特性や耐磨耗性を有しています。従来の金属ギヤ(CAC502製, 8.8 g/cm3)と比較すると、LUBMERTMギヤは約89%軽量です。また、一般的なUHMW-PEに比べて加工が容易であることに加え、溶融混練によりリサイクルが可能なため、循環型経済の観点からも整合性のある材料です。
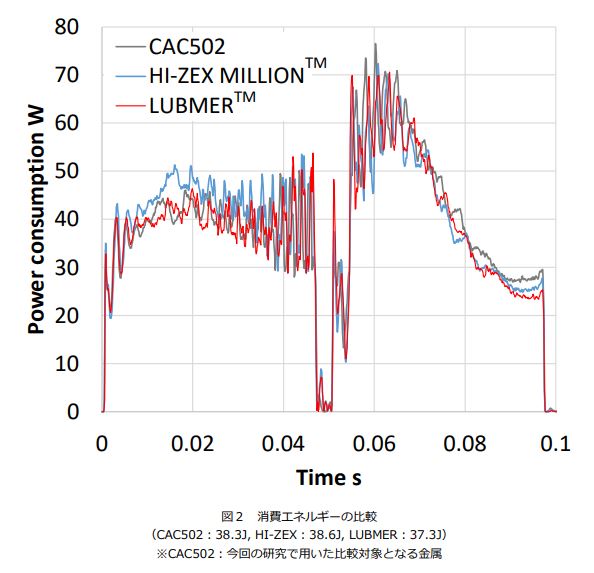
これらの材料を用いたUHMW-PEギヤをロボット指部に組み込み、関節を動かした際の消費エネルギーの比較を行ったところ、HI-ZEX MILLIONTMギヤは従来の金属ギヤと結果に大きな差が生じませんでしたが、一方でLUBMERTMギヤは金属ギヤに比べて約3%のエネルギー消費低減を達成しました(図2)。換言すれば、ロボットの一つのパーツの素材を変えるだけで、設計変更を行うことなく、約3%のエネルギー消費低減を実現することを可能といたしました。
(3) そのために新しく開発した手法
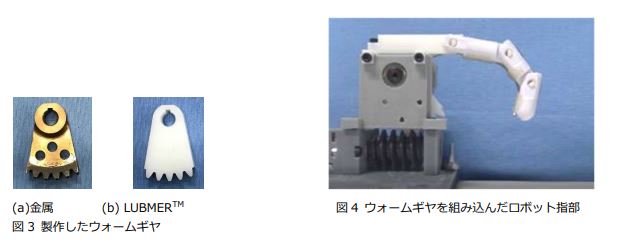
まず、ロボットの指を駆動するために、UHMW-PE製のウォームギヤホイールを製作しました(図3)。本研究では、サンプル条件を統一するために、HI-ZEX MILLIONTMとLUBMERTMを同じ切削加工によりギヤを作製しました。ウォームギヤの効率を向上させるためには、ギヤの摩擦係数を低くすることが有効です。ウォームとウォームホイールの接触部の摩擦には、歯数、ウォームとウォームホイールの押し付け力、駆動トルク、駆動回転数、潤滑状態などの条件が影響します。実験条件を合わせるため、各ウォームギヤは等価なパラメータで製作し、同一ウォームと合わせてロボット指に組み込み使用しました(図4)。
(4) 研究の波及効果や社会的影響
ロボットの多くはギヤを用いているため、ギヤの交換だけでエネルギー消費を低減できるという本成果は、様々なロボットに利用可能です。また、LUBMERTMギヤでロボットの腕や足を軽量化することで、ロボットのモータが同じでも、さらなる高速動作やダイナミックな動きを実現することが可能になります。
エネルギーの面の他に、LUBMERTMギヤは、その素材の特性として低摩擦、自己潤滑性を有するため、潤滑油を全く必要としないオイルレス駆動が可能となります。ロボット関節のオイルレス化は、定期的なオイル交換などのメンテナンスが不要であり、今後のロボットの実用化に向けて重要な技術です。また、低摩擦の歯車は、走行時の騒音を低減することが知られています。ロボットの駆動音は周囲の人間に悪い印象を与えるため、ロボットの社会的な普及が進むと、ロボットの静粛性の重要度が増していきます。低摩擦化により、社会に受け入れられるロボットになっていくことも期待できます。
(5)今後の課題
一般的に、樹脂素材は金属よりも強度に劣るため、現時点では樹脂製のギヤはそのまま用いると低負荷な部位のみにしか使用することができません。今後は、新たな技術開発をさらに進めて、ロボットの他の部位にもLUBMERTM製のギヤを搭載し、より高負荷・高速でのエネルギー消費低減効果の検証や、UHMW-PEギヤによるオイルレス駆動の実用性、低騒音効果など、付随する効果の検証を進めていく予定です。
(6) 研究者のコメント
化学メーカーとの産学連携により、最先端材料を用いることで多くのロボットのエネルギー消費低減に貢献できる技術を開発できました。ロボットの軽量化にもつながるため、ロボットがもっと高速に動くことも可能になります。メンテナンスを減らすなどの効果も期待できるので、さらなる検証を進めて参ります。
(7) 用語解説
*1 超高分子量ポリエチレン(UHMW-PE)
UHMW-PEとは、一般的に平均分子量が1.0×106以上と非常に高く、通常のポリエチレンや他のエンジニアリングプラスチックよりも優れた摺動特性、耐摩耗性、衝撃強度を示すポリエチレンの一種です。
*2 加藤一郎教授
早稲田大学にてヒト形ロボットの研究開発を始め、1973年には世界初の本格的人間形知能ロボットWABOT-1を開発しました。WABOT-1は、人間とのコミュニケーションを簡単な日本語の会話で行い、対称物を認識し距離・方向を測定し、2足歩行によって移動し、触覚を有する両手で物体の把握・移動などの作業を行うことが可能です。
*3 ウォームギヤ
ギヤ機構の1種で、逆転しにくい性質を持ちます。そのため、同じ姿勢を長時間維持するような場合にもモータの必要電力を少なくすることが出来ます。
(8) 主な競争的研究資金
研究費名: 科研費 基盤研究(S)
研究課題名:人型ロボットの身体内保存力学的エネルギー活用による高効率運搬・スポーツ動作の実現
研究代表者名(所属機関名):高西淳夫(早稲田大学)
(9) 論文情報
雑誌名:IEEE access
論文名:Energy Efficiency Improvement of a Robotic Finger with Ultra High Molecular Weight Polyethylene Gear
執筆者名(所属機関名):Takuya Otani*a, Hiroki Mineshita*a, Keigo Miyazawa*a, Yuri Nakazawa*a, Hideyuki Kasuga*b, Ryuki Kawai*c and Atsuo Takanishi *a
*a—Waseda University, *b— hide kasuga 1896 Inc., *c—Mitsui Chemical Inc.
掲載日時(現地時間):2022年9月19日
掲載URL:https://ieeexplore.ieee.org/document/9895260
DOI:10.1109/ACCESS.2022.3207752