複雑な配管内の情報を正確な地図として自動生成するヘビ型ロボットを開発
ImPACTタフ・ロボティクス・チャレンジによるタフなヘビ型ロボットの開発
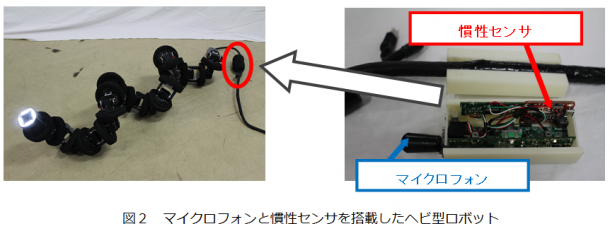
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:東北大学大学院情報科学研究科 田所諭(たどころ さとし)教授)における研究開発課題「タフな索状ロボットおよび極限ヒューマンインタフェースのための極限制御システムの開発」(研究開発課題責任者:京都大学大学院工学研究科 松野文俊(まつの ふみとし)教授)において、松野 文俊教授、早稲田大学理工学術院創造理工学研究科 奥乃博(おくの ひろし)教授、岡山大学大学院自然科学研究科 亀川哲志(かめがわ てつし)講師、金沢大学理工研究域機械工学系 鈴木陽介(すずき ようすけ)助教らは、プラント設備の配管内の日常点検や緊急時の点検を目的としたヘビ型ロボット(図1、2)を開発し、複雑な配管内を走破し、配管内の状況を正確に提供することに成功しました。
研究開発成果のポイント
- ヘビ型ロボットに皮膚型触覚センサである全周圧力センサを搭載し、曲管を含む複雑な配管内の走破を実現(図3)。
- 音響センサによる配管内距離情報、慣性センサ※1)からの進行方向情報、多関節モデルによる姿勢推定情報を組み合わせて、精度良くロボットの位置を推定し、同時に配管のマップを作成できる技術(統合型SLAM※2)を開発。
- 先端カメラによる画像、全周圧力センサの接触情報、統合型SLAMとの統合による収集情報の可視化を行う点検用情報表示を高度化(図4)。
研究開発の背景と経緯
ヘビ型ロボットは、脚型ロボットや車輪型ロボットでは進入できない空間かつファイバースコープでは到達できない場所へのアプローチを実現し、狭隘で複雑な環境への検査点検ソリューションを提供することを目的に開発がなされています。その適用の一つとして、プラント設備の配管内外の日常点検や緊急時の点検を行うことが期待されています。
これまでに配管内を走破するロボットは開発されてきましたが、オペレータに提供される情報が限られており、曲管などを含む複雑配管内でロボットを操作するのは困難でした。これは、オペレータはヘビ型ロボットの先頭に搭載されたカメラからの映像をもとにマニュアルで操作する必要があり、ヘビ型ロボットの配管内での状況を十分に把握できないことに原因がありました。
また、これまでのヘビ型ロボットでは、移動が可能な場面であっても、配管内の情報を正確に収集することは困難でした。これについては、配管内をロボットが移動すると配管内の汚れの状態が変化し、カメラで取得したテキスチャ※3)が毎回変化することが多く、また、垂直の配管を上っている最中に滑り落ち、ロボットの位置が分からなくなるなど、従来の画像とオドメトリ※4)によるビジュアルSLAM(自己位置決定と配管地図の同時生成)が使用できないことに原因がありました。本研究開発チームは、ImPACT タフ・ロボティクス・チャレンジの共同研究開発の一つのテーマとして、これらの課題を解決するためにヘビ型ロボットとそのインタフェースの開発を進めてきました。このたび本研究開発の要素技術を統合化し、複雑な配管内を走破し、配管内の状況を正確に提供することに成功しました。
研究開発内容(本研究開発の意義)
上述の課題を解決するため、以下の機能を備えた新たなヘビ型ロボットとそのインタフェースを開発しました。
(1)皮膚型の触覚センサを搭載したヘビ型ロボットシステムの開発(岡山大・亀川、金沢大・鈴木、京大・松野)
ヘビ型ロボットの表面に巻き付けて装着できる皮膚型の触覚センサである全周圧力センサを新たに開発しました。20個の関節を持ち、各関節のモータを駆動させることで様々な移動方式を実現できるヘビ型ロボットのリンクに全周圧力センサを搭載しました。これにより、オペレータから直接見ることのできない狭い隙間や配管の中にヘビ型ロボットが進入するときも、適切な力で配管に突っ張っているかどうかや、前進を妨げる障害物や配管の曲がりを把握することができるようになりました。また、曲管部の形状に合わせてヘビ型ロボットの螺旋形状を曲げた状態で捻転動作により移動を行う曲螺旋捻転運動を新たに開発しました。これらにより、従来はオペレータにとって操作が非常に困難であった曲管部のヘビ型ロボットによる走破が可能になりました。

(2)センサ情報を融合し自己位置決定と配管地図を同時生成する統合型SLAMの開発(早稲田大・奥乃、京大・糸山、岡山大・亀川、京大・松野)
まず、管の入り口にスピーカを設置し、ヘビ型ロボットのしっぽ部分にはマイクと姿勢を計測できる慣性センサを装着します。搭載されたマイクを用いて設置されたスピーカからの音の再生・到達時間の差による配管内のロボットの距離の推定を行います。この音響システムによる配管内距離情報、慣性センサからの進行方向情報、多関節モデルによる姿勢推定を組み合わせた統合型SLAMを開発しました。これにより、従来の手法では困難であった配管内でのヘビ型ロボットの現在位置・姿勢の推定と配管地図の同時生成が可能になりました。その精度として、水平管・垂直管・曲管を含む長さ6mの200Aの配管で距離推定誤差7%以内を達成、配管地図精度は体積率で68%以上を達成しました。
(3)接触・音響・慣性・画像センサ・多関節モデルによる点検用インタフェースを高度化(京大・松野、早稲田大・奥乃、京大・糸山、金沢大・鈴木、岡山大・亀川)
ヘビ型ロボットのリンクには全周圧力センサが、しっぽには音響・慣性センサが、先頭にはライトと画像センサが搭載されています。また、ヘビ型ロボットの各関節には角度センサが配置されており各関節の角度情報も得ることができます。(2)の項目で開発した統合型SLAMを用いて、ヘビ型ロボットの先頭に搭載されたカメラにより撮影された写真を配管地図上にマッピングする技術を開発しました。また、ヘビ型ロボットの運動により激しく回転してしまうカメラ映像の安定化・配管内におけるヘビ型ロボットの形状の提示・配管へのヘビ型ロボットの突っ張り力の提示など情報の可視化技術を開発しました。これにより、配管内点検時にヘビ型ロボットの状態や配管内部の様子を確認しながら遠隔操縦することが可能になり、オペレータの負担の軽減化を達成しました。また、配管全体の状況の把握、点検箇所の記録・確認が可能になり、収集情報の記録と利活用が容易になりました。

今後の展開
プラント設備等の実環境で運用するために、
- 防水防塵機能を実装したヘビ型ロボットの開発
- 各種センサの情報を用いた様々な環境でのヘビ型ロボットの半自律制御の開発
- 故障診断と故障時やタスク失敗時のリカバリー機能の開発
- オペレータへの負担のさらなる軽減化のために直感的で柔軟なユーザインタフェースの開発
を進めています。これらの技術の導入により、プラントの配管設備の日常点検だけでなく、災害発生時の初動点検での運用も期待できると考えられます。
特記事項
本成果は、以下の事業・研究プロジェクトによって得られました。
- プログラム・マネージャー:田所 諭
- 研究開発プログラム:タフ・ロボティクス・チャレンジ
- 研究開発課題:タフな索状ロボットおよび極限ヒューマンインタフェースのための極限制御システムの開発
- 研究開発課題責任者:松野 文俊
- 研究期間 : 平成26年度~平成30年度
- 本研究開発課題では、狭隘で複雑な環境への検査点検ソリューションを提供することを目的にヘビ型ロボットの開発に取り組んでいます。
用語説明
- ※1) 慣性センサ:正確には慣性計測装置(英語: Inertial Measurement Unit、略称:IMU)であり、物体の運動を司る3軸の角度(姿勢)と加速度を検出する装置
- ※2) SLAM:自己位置決定と配管地図の同時生成 (Simultaneous Localization and Mapping)
- ※3) テキスチャ:視覚的な色や明るさの均質さ
- ※4) オドメトリ:移動ロボットの車輪や関節の回転速度から移動速度を求め,それを積分して位置と姿勢を求める自己位置推定法
田所諭ImPACTプログラム・マネージャーのコメント
 ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」様々な技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」様々な技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
ロボットは配管内の点検に広く使用されていますが、曲管、異形管、バルブなどの狭窄部、鉛直や急勾配での移動は困難でした。また、移動しながらの3次元マッピングは、配管が複雑な場合には十分な精度が得られないことが大きな問題でした。本研究は、新しい索状(ヘビ型)ロボットを開発し、全身の圧力センサを使ったつっぱり動作や捻転動作によって複雑な場所での移動を可能にするとともに、音響センサ、関節センサ、ロボットの多関節モデルを併用することによって精度良く配管内の3次元マップを作成することを可能としたもので、ImPACT-TRCが目指している大きな非連続イノベーションを実現するコア技術になると期待されます。今後、プラントの配管、ダクトなど、様々な環境での適用試験を進め、厳しい現場での実用性を高め、災害予防に貢献していきたいと考えています。






