 近年、地震や津波などの災害発生後には、状況把握、緊急作業、復旧作業などの災害対応作業を実施するために、さまざまなロボットシステムが導入されています。現場状況の調査には、Unmanned Aerial VehicleやUnmanned Ground Vehicleなどが、崩落の危険性の高い斜面や、放射線や有毒ガスなどが存在する危険な環境で実施される緊急作業では、安全な遠隔地からロボットを操作する遠隔操作システムが、瓦礫撤去や整地などを行う復旧作業では、双腕タイプの建設機械をはじめとする大型の油圧駆動型ロボットが、それぞれ稼動しています。このように、災害対応の各フェーズにおいて高度な技術が整備されてきている一方、現在の災害対応ロボットの多くは、複雑な地形の農作地や急峻な山間部などの不安定な地面を越えて、密集した住宅地などの狭隘空間へ進入し、切断・解体などの複雑な緊急・復旧作業を遂行することが難しいのが現状です。そこで、上述した狭隘空間での複雑作業への対応を主眼においた次世代災害対応ロボットのプラットフォームとして、4腕式極限作業ロボット「オクトパス」を開発しました。
近年、地震や津波などの災害発生後には、状況把握、緊急作業、復旧作業などの災害対応作業を実施するために、さまざまなロボットシステムが導入されています。現場状況の調査には、Unmanned Aerial VehicleやUnmanned Ground Vehicleなどが、崩落の危険性の高い斜面や、放射線や有毒ガスなどが存在する危険な環境で実施される緊急作業では、安全な遠隔地からロボットを操作する遠隔操作システムが、瓦礫撤去や整地などを行う復旧作業では、双腕タイプの建設機械をはじめとする大型の油圧駆動型ロボットが、それぞれ稼動しています。このように、災害対応の各フェーズにおいて高度な技術が整備されてきている一方、現在の災害対応ロボットの多くは、複雑な地形の農作地や急峻な山間部などの不安定な地面を越えて、密集した住宅地などの狭隘空間へ進入し、切断・解体などの複雑な緊急・復旧作業を遂行することが難しいのが現状です。そこで、上述した狭隘空間での複雑作業への対応を主眼においた次世代災害対応ロボットのプラットフォームとして、4腕式極限作業ロボット「オクトパス」を開発しました。
次世代の災害対応ロボットに求められる性能および、オクトパスの設計アプローチについて述べます。
効率よく、安全に、かつ正確に災害対応作業を行うためには、複雑な地面であっても安定的に走破し目的地まで素早く到達できる能力(踏破性と呼ぶ)、さらに、物体の引き剝がしなどのさまざまな作用を正確かつ迅速に与えられる能力(作業性と呼ぶ)を備える必要があります。災害対応ロボットには、作業空間に合わせた体格や重量(環境適用性と呼ぶ)であることを前提に、作業環境や作業内容に応じた高度な踏破性と作業性が求められます。他方、人間が2人で協力して作業を行うと、その作業の質や量が改善されるだけでなく、遂行できる作業の種類が格段に増加することが容易に想像されます。災害対応ロボットにおいても、4つ以上の腕を有することは、より高度な災害対応作業を実現できる高い潜在性を秘めているといえます。
踏破性のためにクローラの能力を、作業性のためにアームの能力をそれぞれ独立に向上させると、体格や重量を過大に増加させてしまうことが懸念されます。そこで、踏破性のためのクローラ設計と作業性のためのアーム設計において、それぞれに機能的な冗長性を持たせ、不足する部分をお互いに補間するような設計を提案しました。アーム(腕)とクローラ(足)における機能的冗長性と機能的多用途性を持たせることで体格の増大を抑えつつ、作業性と踏破性を両立させる方策を採ります。それを具現化したものがオクトパスです。4つの腕を協調的に制御することで、オクトパスは2本腕のロボットでは実現が難しかった複雑なタスクを効率よくかつ安定的に実行することが期待されます。例えば、2つの腕を使って安定的に瓦礫を把持し、適切な姿勢に調整したのち、3つ目の腕に装着されたチェインソーやファイバーレーザーなどを使って瓦礫を切断し、対象物をより細かな破片に分割することができます。また、消火作業や狭隘空間での道路の啓開作業などにオクトパスの導入が期待されます。さらに、4つの腕で地面を押し、車体の安定化を図るとともに、車体の重心を上方へ移動させることで、クローラのみでは踏破が難しい高い段差も踏破できます。
補助モニタにて状態を確認しつつ、目視でオクトパスを操作する実験を行いました。オペレータAが2つの前アームとクローラを、オペレータBが2つの後ろアームを操作しています。
クローラ・フリッパーのみでは踏破できない400mmの高さの段差を、4腕を利用しながら昇降するタスクを行いました。はじめにクローラを使って、フリッパーが段差のエッジを捉えるまで前進し続けます。その後、後方腕で地面を押し、前方腕は重心を上前方向に動かすように前方へ伸ばします。同時に、クローラで前進し、段差を昇りきります。段差を降りるときは、前方(移動方向において)の腕を使って自身を支えて、重心の急激な移動が起こらないようにする。このように腕を上手く利用することで、安定的に段差昇降が可能となることが確認されました。
物体が接着された長尺物が地面に設置されているため、4腕を使って解体するタスクを行いました。まず、2つの前方腕で地面の物体を掴み、持ち上げます。同時に、後方腕の1つを前方に旋回させ、2つの前方腕の間から接着へ近づき引き剝がし動作を行います。正確な位置調整を実現するために、もう1つの後方腕の先端にはCCDカメラを搭載しています。このように4つの腕を巧みに利用することで、複雑な作業が実現できることが確認されました。
今後は、全身自由度の高次協調制御ロジックの開発や、環境認識技術の拡充、さらには、より操作性の高いヒューマンマシンインタフェースの開発を行う予定です。
関連論文:Mitsuhiro Kamezaki, Hiroyuki Ishii, Tatsuzo Ishida, Masatoshi Seki, Ichiryu Ken, Yo Kobayashi, Kenji Hashimoto, Shigeki Sugano, Atsuo Takanishi, Masakatsu G. Fujie, Shuji Hashimoto, Hiroshi Yamakawa, “Design of Four-Arm Four-Crawler Disaster Response Robot OCTOPUS, ” Proceedings of 2016 IEEE International Conference on Robotics and Automation (ICRA2016), pp. 2840–2845, May 2016.
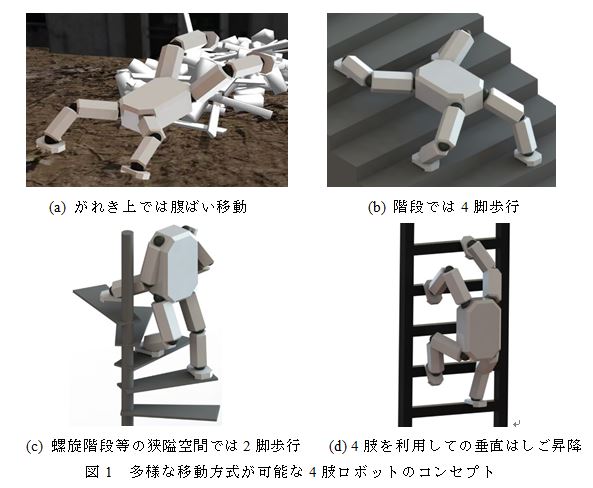
地震や洪水、噴火などの大災害や老朽化に伴うインフラ事故が相次いで発生しており、そのような極限環境下で人間の代わりに作業が可能なロボットへの期待が高まっています。そこで、災害対応ロボットのあり方について、早稲田大学理工学術院の高西淳夫教授、早稲田大学高等研究所の橋本健二准教授らと三菱重工業株式会社は2014年から共同研究を実施しており、4肢を共通構成とする脚型ロボットを提案してきました。これは、垂直はしごも昇降可能なもので、従来の4脚歩行や2脚歩行だけでなく、崩壊の危険性のあるがれき上では胴体部も積極的に接地させて移動するという高い移動能力を実現するものです。
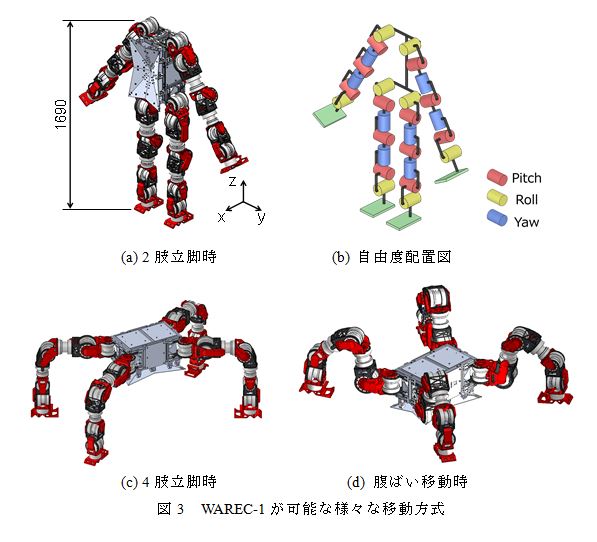
このコンセプトを実機で実現するためには、路面に接地させても壊れない頑健な構造をロボットが持たなければなりません。さらに、がれき上を移動時に、ロボットの関節外に配線が露出していると配線が断線する恐れがあるため、配線を関節内部に収納しなければならないなどのハードウェア設計上の多くの課題があります。このような課題の解決を図り、内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所 諭)の一環として、4肢ロボットWAREC-1(WAseda REsCuer – No. 1)を開発しました。WAREC-1は4つの肢を持つ脚型ロボットで、1肢7自由度の全28自由度を持ち、垂直はしご昇降だけでなく、4脚歩行や2脚歩行も可能なように設計されています。2肢立脚時の全高は1690mm、体重は約150kgです。分散制御システムを採用することで省配線化を実現し、中空構造のアクチュエータユニットを開発することで各肢内部への配線の収納も実現しました。これまでに、脚型ロボットで踏破が難しいとされていた垂直はしごやがれき上での移動を実現し、現在は、工具を使用した作業の実現や遠隔操作システムの統合を目指し研究を進めています。

図2 4肢ロボットWAREC-1
詳細は、http://www.takanishi.mech.waseda.ac.jp/top/research/rescue/index_j.htmをご覧ください。
 自動車やドローン、クレーンなど、視点が移動するロボットは多岐に渡る。ロボットの自動化が進んでいる一方で、環境への適応性などの観点から、人が操作するロボットは実用性が高く、社会に広く普及している。コロナ禍の影響もあり、ロボットを遠隔で操作する技術が求められている。
自動車やドローン、クレーンなど、視点が移動するロボットは多岐に渡る。ロボットの自動化が進んでいる一方で、環境への適応性などの観点から、人が操作するロボットは実用性が高く、社会に広く普及している。コロナ禍の影響もあり、ロボットを遠隔で操作する技術が求められている。
本インタフェースは、多様な構造のロボットを直感的に操作するために開発された。ロボットは複雑な環境に適合するため、一般的に人間の身体とはかけ離れた構造をしている場合が多い。このようなロボットの構造や機構に関する性質は「身体性の違い」と呼ばれる。当インタフェースは「身体性の違い」に適応するために、ジンバル構造でロボットを直接掴むような操作感での入力が可能である。6自由度入力が可能であり、ロボットの直感的な操作を実現する。
配管検査用ロボットおよびドローンでの操作実験を実施した。操作成績および脳活動の成績では、初心者および熟練者の両者において、従来の操作方式であるキーボードやジョイスティックなどよりも好成績を収めた。知的な制御支援などの今後の更なる開発が期待されている。

超高齢社会に入り、生活や就労のいろいろな場面でロボットによる支援が期待されています。しかし、現状のロボット開発研究では、エンタテイメントの用途や2足歩行技術に注目が集まりやすく、人間と共存して人間を支援できる人間共存ロボットの機能や形態に関する研究例は多くはありません。
この背景には、人間共存に必要となる「安全・安心」、「巧みさ」といった基本機能の実現が技術的に難しいことが指摘できます。そこで、人が日常生活を営む環境において、人と円滑にコミュニケーションを図りつつ、人に適切な生活支援を提供するロボットの実現を目指し、我々は人間共存ロボットTWENDY-ONEを開発しました。
TWENDY-ONEの最大の特徴は身体各部に搭載した機械的な受動柔軟性です。この受動柔軟性による誤差吸収機能、なじみ機能を用いて生活環境に内在する様々な誤差や外乱・複雑さを吸収しつつ作業を遂行すると共に、人間との触れ合い時には高い応答性と適応能力を発揮することが可能です。これらの技術を活かし、対象物把持・操作等の巧みさが求められる家事支援、高出力性・人間への適応性・操作性が求められる介助支援を実現しています。
ごく一般的な家庭などの生活環境下において、人に合わせて作られた器物や物資を人と同様に扱えるようにするため、TWENDY-ONEは、成人女性並みの体格寸法と人と同等の可動範囲を備えています。移動部には、人と共存しつつ安定な移動作業を行え、かつ人との不測の接触時にも適切に外力を受け流せるよう全方向移動台車を採用してあります。胴部は、床面に落ちた物を拾ったり床拭き作業を行えるよう垂直方向を含め大きな可動域を確保した4自由度構成となっています。また、障害物を回避しつつ複雑な作業を行う必要のある腕部には冗長性を持たせ7自由度構成とし、手首の先には、複雑形状の対象物を安定に把持・操作することが可能な13自由度人間形多指ハンドが搭載されています。外装のデザインに関しては、曲面を基調とし、ハーネスを内蔵しつつ関節可動域を確保した上で、見た目の親しみやすさと人との触れ合い時の安全確保を両立する絶妙な構成を追及しました。
 TWENDY-ONEの腕部は、肩・肘の4自由度に小型・軽量な受動柔軟関節機構を備えています。これにより、環境との接触を伴う作業においてモデル化誤差や環境認識誤差が生じたとしても、機械的受動性でそれらを吸収しながら高速かつ安定した作業遂行を行うことが可能となります。また、内部に機械ばねを搭載したこの受動柔軟関節機構は、人への追従性にも優れるため、速やかな力低減が図れるなど、人との接触時の安全性を高める効果があります。さらに、万が一、人との衝突が生じたとしても、人に重大な怪我を負わせないようにするため、体表面上には、衝突安全被覆が搭載されています。また、腕部全面には分布型圧力センサが搭載されており、接触圧情報を利用した安全制御も行えることに加え、接触圧情報を用いることで、全身の体表面との接触を活用しながら介助動作や重量物の運搬を行うことも可能です。
TWENDY-ONEの腕部は、肩・肘の4自由度に小型・軽量な受動柔軟関節機構を備えています。これにより、環境との接触を伴う作業においてモデル化誤差や環境認識誤差が生じたとしても、機械的受動性でそれらを吸収しながら高速かつ安定した作業遂行を行うことが可能となります。また、内部に機械ばねを搭載したこの受動柔軟関節機構は、人への追従性にも優れるため、速やかな力低減が図れるなど、人との接触時の安全性を高める効果があります。さらに、万が一、人との衝突が生じたとしても、人に重大な怪我を負わせないようにするため、体表面上には、衝突安全被覆が搭載されています。また、腕部全面には分布型圧力センサが搭載されており、接触圧情報を利用した安全制御も行えることに加え、接触圧情報を用いることで、全身の体表面との接触を活用しながら介助動作や重量物の運搬を行うことも可能です。
TWENDY-ONEの胴部は、屈曲3自由度・旋回1自由度を備えており、床上作業を行うことができます。また、床面からの重量物の持ち上げや介助作業支援を行えるように高出力アクチュエータが搭載されています。バックパックには、ロボット全身の計測制御に要する小型コントローラを7台収納してあり、胸部中央のLED部には、内部状態に応じて発光パターンが変わる機能が搭載されています。また、胸部・背部には分布型圧力センサが埋め込まれており、介助作業中に生じる人との触れ合いや接触を検知し、適応的に振舞うことが可能です。移動部には、全方向移動台車を採用したことで、狭い作業スペースでも効率的に移動することができます。さらに、超音波による障害物検知機能や6軸力覚センサによる接触検知機能を備えており、人の傍らで安全に移動する機能にも優れています。

 TWENDY-ONEの手指部は、一般家庭で扱われる複雑な形状の対象物でも人とほぼ同様に把持・操作できる高度な巧緻性と安定性を実現することを目指し、バイオメカニズムの観点から、人間の手の機能・形態・構造を模倣した設計となっています。そのため、日常生活動作に見られる物体の把持を行いやすい自由度配置や関節構造を採用していることに加え、圧力調整可能な形状と爪を有する指先や柔軟肉といった多種多彩な構造的特徴を備えています。また、各指には小型6軸力覚センサ、全面に分布型圧力センサを搭載しており、柔らかいプラスチックのコップの安定把持など、高度なセンサヒュージョンに基づく認識や制御を行えるセンサ構成となっています。 さらに、関節には受動柔軟機構が搭載されており、これで得られるなじみ機能は、複雑な対象物形状に起因するモデル誤差や位置誤差を吸収しつつ、安定した把持・操り動作を実現する上で重要なポイントです。
TWENDY-ONEの手指部は、一般家庭で扱われる複雑な形状の対象物でも人とほぼ同様に把持・操作できる高度な巧緻性と安定性を実現することを目指し、バイオメカニズムの観点から、人間の手の機能・形態・構造を模倣した設計となっています。そのため、日常生活動作に見られる物体の把持を行いやすい自由度配置や関節構造を採用していることに加え、圧力調整可能な形状と爪を有する指先や柔軟肉といった多種多彩な構造的特徴を備えています。また、各指には小型6軸力覚センサ、全面に分布型圧力センサを搭載しており、柔らかいプラスチックのコップの安定把持など、高度なセンサヒュージョンに基づく認識や制御を行えるセンサ構成となっています。 さらに、関節には受動柔軟機構が搭載されており、これで得られるなじみ機能は、複雑な対象物形状に起因するモデル誤差や位置誤差を吸収しつつ、安定した把持・操り動作を実現する上で重要なポイントです。
TWENDY-ONEの頭部は、旋回・屈曲の2自由度を備えていることで、十分な視野角を確保できることに加え、首をかしげる自由度により幅広い表情表出動作が可能です。加えて、ステレオカメラによる視覚認識をはじめ、スピーカによる発話機能、カメラ周りのLEDによる内部状態表出機能、6軸力覚センサによる接触検知機能なども実装されており、人との多彩で円滑なコミュニケーションが期待できる構成となっています。

詳細は、http://www.twendyone.com/index.htmlをご覧ください。
