早稲田大学次世代ロボット研究機構が2016年11月11日(金)、日中韓三カ国のメディアから共同取材を受けました。
本取材は、中国の環球時報社が日中韓三カ国協力事務局(TCS)の協力のもと、日中韓のメディアの共同取材を通じて、北東アジアにおける各国の産業発展の現状、抱える課題と対策等について情報共有し、相互の経済的、人的協力のきっかけづくりを目的に開催されたもので、今回が3回目にあたります。
主な取材内容は、早稲田大学におけるロボット研究の沿革、次世代ロボット研究の現状や最新成果、今後の展望等でした。
参加メディア(順不同):
中国側 環球時報、21世紀経済報道、新浪網
韓国側 The Korea Herald、The Korea Economic Daily
日本側 中日新聞社、毎日新聞社、時事通信社
見学内容
見学は、先端生命医科学センター(TWIns) 50号館3階ホワイエ、喜久井町キャンパス41号館2階菅野研究室および3階高西研究室、喜久井町キャンパス40号館グリーン・コンピューティング・システム研究センター岩田研究室で行われました。
はじめに、先端生命医科学センター(TWIns) 50号館3階ホワイエにて、山川宏次世代ロボット研究機構長から、次世代ロボット研究機構についての概要説明がありました。山川機構長は、早稲田のこれまでのロボット研究の実績などを紹介した他、次世代ロボット研究機構が設置されるに至った経緯や意義を次のように説明しました。
「ロボット産業の技術革新や市場拡大が急速に進む中、ロボットの軍事利用主導の開拓とそれに伴う人材流出が近年の世界的な懸念事項となっています。本研究機構は、このような事態に相対し、『人と共に歩み、人を支え助ける存在』として人と共生するロボットの開発を長年目指してきた本学の姿勢とプレゼンスを世界的に示すことを使命としています。また、真に豊かな人間社会を目指すためにロボットの平和的活用を促進する研究拠点の形成に向け、『災害対応』、『ヘルスケア』、『共創』を研究テーマに据えた研究活動を実施しています」
【次世代ロボット研究機構について説明する山川次世代ロボット研究機構長】

続けて、研究の説明やデモンストレーションを次のように行いました。
【自律移動型環境モニタリングロボットWAMOT-6およびWAMOT-3-FRを説明する石井裕之 理工学術院准教授と、高西研究室の横山裕也さん(総合機械工学専攻 修士1年)、呉成偉さん(生命理工学専攻 修士2年)】
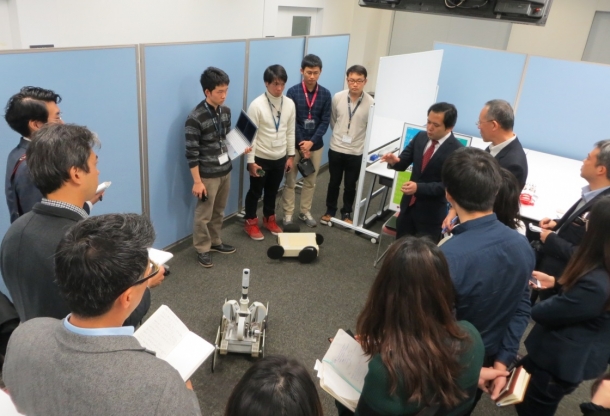
環境モニタリングロボットWAMOTは、近年深刻化している環境問題を考えるうえで重要な、環境の現状を正しく認識することを目的に開発されたロボットです。環境への負荷を最小限に抑えるため小型につくられたWAMOTは、長期間に渡って自律的にモニタリング活動を続けることが可能です。伸縮可能なカメラ付きのアームを備えたタイプも紹介されました。
【オーラル・リハビリテーション・ロボットWAO-2を説明する石井裕之 理工学術院准教授】

オーラル・リハビリテーション・ロボットWAO-2は、現在増加傾向にある顎顔面の疾患(顎関節症、ドライマウス等)に有効なマッサージ療法を可能にしたロボットです。顔面組織に安全な一定の荷重を加えるために綿密な計算がなされ、最適なマッサージ軌道が生成されています。
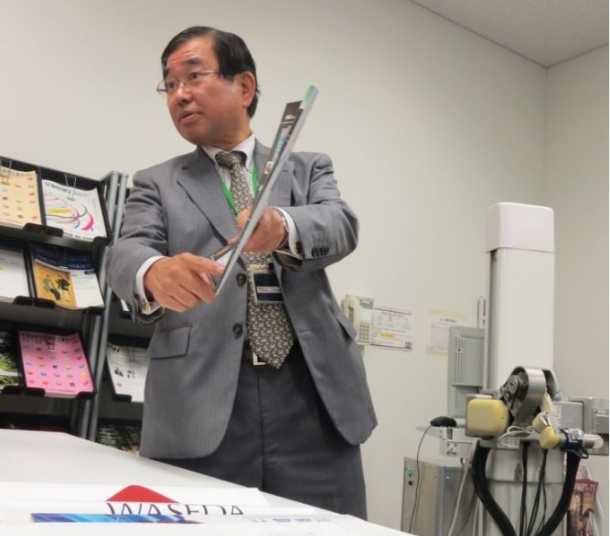
【超小型姿勢計測センサWB-4R・WB-EMGについて説明する高西研究室の孔維晟さん(生命理工学専攻 博士3年)】
超小型姿勢計測センサWB-4R・WB-EMGは、人間の身体動作を客観的に計測できるセンサです。このセンサを身に着けることにより、動作を数値データとして取得することが可能であるとの説明がありました。この技術により、医療手術において熟練者と初心者の違いや、訓練によるパフォーマンスの向上を評価することができます。

喜久井町キャンパス 41号館 3階高西研究室にて
2足歩行ロボット WABIAN-2R、コミュニケーションロボット KOBIAN-RIV、人間共存ロボットTWENDY-ONEなど
【コミュニケーションロボット KOBIAN-RIVを説明する岸竜弘 理工学研究所 研究院助教】
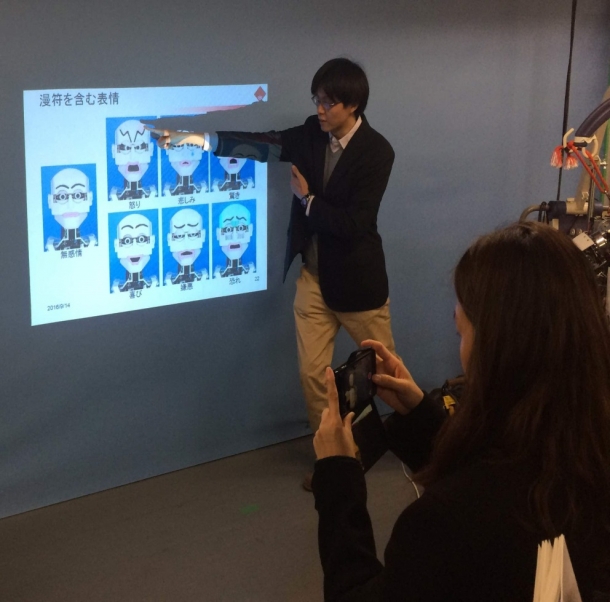
コミュニケーションロボット KOBIAN-RIVは全身に64個のモータを持ち、表情やジェスチャなど非言語による多様な表現能力を有します。表情は漫画家が作成した表情を参考に漫画表現に特有な「漫符」を含む誇張した表現により分かりやすく感情を伝達できます。現在、このロボットの全身表現によって人間の笑いを誘発する研究を実施しています。

【2足歩行ロボットWABIAN-2Rの説明】
人間の骨盤に相当する部分に通常の2足歩行ロボットにはない2つのモータを備えています。一般的な2足歩行ロボットが膝を曲げたまま歩行しているのに対し、WABIAN-2Rは、人間のように膝を伸ばして歩行することが可能です。関節間のリンク長や体重などは成人女性の平均値をもとに設計されており、「人体運動シミュレータ」として人間が使用する福祉器具などの定量的な評価が可能です。
【2足走行ロボットの説明】
早稲田大学スポーツ科学部川上教授との連携のもとで、人間の走行運動の模擬が可能な2足走行ロボットを開発しています。特に、人間が走行中に脚部をばねのように利用し、エネルギーの蓄積を行って効率的な運動を実現していることに注目し、関節に板ばねを搭載し、脚部全体をばねのように動作させるロボットを開発しています。将来的にはアスリートへの適切な走り方の指導への活用などスポーツ科学への応用が期待さます。
【災害対応ロボットWAREC-1】
災害現場にみられる傾斜度、凹凸度、狭隘度の高い極限環境の踏破を実現する4脚型の災害対応ロボットを開発しています。これまでに傾斜度が高い極限環境である垂直はしごの昇降、はしご踏破後のキャットウォークへの乗り移りを実現しました。さらに、凹凸度の高い極限環境であるがれきの散乱した路面において、腹ばいによる踏破を実現しました。また、狭隘度の高い極限環境を移動するため、胴体を垂直に起こし、2足歩行状態での移動も実現しました。
喜久井町キャンパス 41号館2階 菅野研究室にて
【人間共存ロボットTWENDY-ONEの説明 菅野研究室 船橋 賢さん(総合機械工学専攻修士2年)】
超高齢社会に入り、人間と共存して人間を安全に支援できる人間共存ロボットによる支援が期待されています。人が日常生活を営む環境において、人と円滑にコミュニケーションを図り、人に適切な生活支援を提供するロボットの実現を目指し、人間共存ロボットTWENDY-ONEを開発しました。受動柔軟性による誤差吸収機能、なじみ機能を用いて生活環境に内在する様々な誤差や外乱・複雑さを吸収しつつ安全に作業を遂行すると共に、人間との触れ合い時には高い応答性と適応能力を発揮します。これらの技術を活かし、家事支援、介助支援を実現していきます。
【災害対応ロボット OCTPUSの説明 菅野研究室 陳奎さん(総合機械工学専攻 博士後期課程3年)】
災害現場では急斜面や瓦礫の上などの危険な場所で複雑な作業をすることが求められます。現在は大型機械や人の手で作業が行われていますが、大型機械では狭い場所に入れない、複雑な作業ができないなどの問題があります。一方で、人では力不足、危険などの問題があります。そこで災害現場で効率的に作業をするために災害対応ロボット、OCTOPUSが開発されました。OCTOPUSは4本のアームと4台のフリッパーを持ちます。4本のアームと4台のフリッパーを持つことにより、体格の増大を抑えつつ、作業性と踏破性を両立することができます。すなわちOCTOPUSは、瓦礫や石のあるような平坦でない地面や斜面の走行、段差の乗り越え、階段の昇降などの能力を有し、瓦礫の除去、倒木の除去、消火作業などをはじめとして各種の現場における活用が期待されています。

喜久井町キャンパス 40号館 グリーン・コンピューティング・システム研究センターにて
人工筋肉駆動型高背屈支援RTや遠隔妊婦検診のための超音波検査支援RTなど
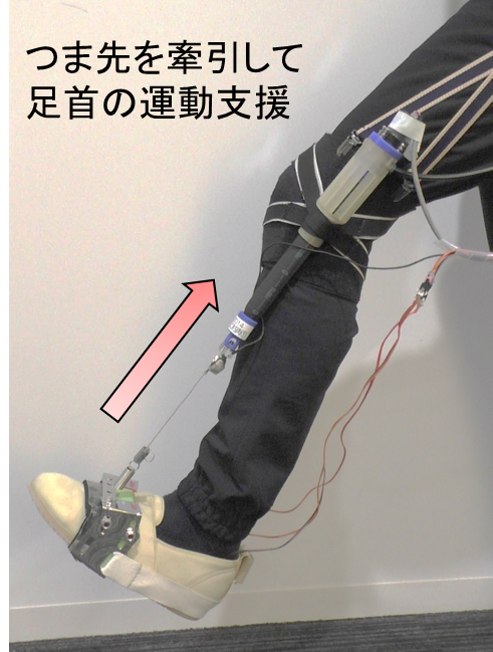
【人工筋肉駆動型高背屈支援RTの説明 岩田研究室 鈴木慈さん(創造理工学研究科修士2年)と平井大智さん(創造理工学部4年)】
脳卒中片麻痺患者は、運動麻痺により歩行中に足を振り出す際に、つま先が垂れ下がってつまずく原因となります。それに対して空気圧式の人工筋肉によりつま先を牽引することで、足が振り出しやすくなり安全な歩行リハビリが可能になります。
【BF型知覚支援RTの説明 岩田研究室 齋地健太さん(創造理工学研究科修士1年)】
足感覚麻痺患者の歩行リハビリを支援する知覚共感ウェアです。脳卒中片麻痺患者が抱える感覚麻痺に対して、足底圧覚に応じた振動BF(バイオフィードバック)を体幹背部に与えることにより、異常な接地状態に早く気づかせ、歩行リハビリ効率の向上を図る仕組みです。さらに、片麻痺者と理学療法士が当該ウェアを同時に着用することによって、片麻痺患者の足圧情報を双方で共有でき,不適切な接地状態の見逃しを防ぐことも可能です。

【遠隔妊婦検診のための超音波検査支援RTの説明 岩田研究室 竹内里奈さん(創造理工学研究科修士1年)】
産科医および産科医療施設の不足による医師の労働の負担や妊婦の通院の負担の増加が問題となっています。そこで本研究では、これらの問題に対して産科医療施設に行かなくても超音波検査における遠隔健診および自動健診が可能なRTの開発を進めています。

総括および質疑応答
最後に、山川次世代ロボット研究機構長から見学会の総括および質疑応答がありました。記者からは、自動車産業や電気産業と比較して企業サイドから見た場合にロボット産業の位置づけはどうなのか、ロボットとともに安心して暮らせる社会はいつ訪れるのか、早稲田が開発したロボットの実用化水準はどうなのか、日中韓共同でのロボット産業や人工知能の研究についての協力の可能性等、様々な質問が寄せられました。
【記者からの熱心な質問に対して回答をする山川次世代ロボット研究機構長】

高西研究室HP【http://www.takanishi.mech.waseda.ac.jp/top/research/】
菅野研究室HP【http://www.sugano.mech.waseda.ac.jp/jp/】
岩田研究室HP【http://www.jubi-party.jp/research.html】