Trilateral Cooperation Secretariat (TCS)が主催する2017 Trilateral Journalist Exchange Program (TJEP:2017年度日中韓三国協力プログラム)の一環で、早稲田大学次世代ロボット研究機構が2017年6月20日(火)日中韓三カ国メディアから昨年に続き共同取材を受けました。
TJEPの2017年度のテーマは“Industry 4.0”。
次世代ロボット研究機構のロボット等が産業や生活にどのように活かされているか等について、中国、韓国、日本のメディア取材陣および通訳計18名※が一堂に会して活発な質疑応答を行いました。また、Labツアーでは実際にロボットを各国メディアの目の前で動かして説明が行われるなど、早稲田大学次世代ロボット研究機構の研究を国内外に発信することができました。
※参加メディアの皆様
- 中国:China Daily(中国日報)、China Radio International(中国国際放送)、China News Week(中国新聞週刊)、Phoenix Weekly(鳳凰週刊)
- 韓国:Maeil Business News、JoongAng Ilbo、Korea Herald、Chosen Ilbo
- 日本:日経新聞、中日新聞、NHK、時事通信社
40号館GCS開発センターにて次世代ロボット研究機構顧問の山川宏名誉教授からの概要説明ののち、Labツアーを行いました。今回のLabツアーでは、人間共存型ロボットの能動的な働きかけによる人間協調技術の研究などの最先端技術を研究している、菅野研究室を紹介しました。
LabツアーⅠ:【人間共存ロボットTWENDY-ONE】
喜久井町キャンパス204A室 担当:修士2年大西智也さん
ここでは人間共存型ロボットの研究開発が行われています。スクリーン上での概要説明が行われ、記者のみなさんは熱心に耳を傾けていました。「安全・安心」「巧みさ」といった基本機能に着目した人間共存ロボット。柔軟関節機構や衝撃吸収用の柔軟皮膚による機械的な柔らかさを活かして、高齢者への介助を支援したり、家事支援を行ったりします。ユーザからの音声指示や力追従制御を巧みに用いることで、要介助者がベッドから車いすへの移動する際の力補助ができます。また、ヒューマンミメティックな指形状を有するハンド、タクタイルセンサを用いた圧力制御により、ストローなどの細長いものつまみ上げ、持ち替えを行い、コップに挿して手渡すことができます。人間と共存して人間を支援できる人間共存ロボットの機能や形態に関する研究例は多くありません。早稲田大学はその最前線の研究を行っています。
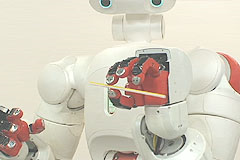 ストローの持ち替え動作
ストローの持ち替え動作
 車いすへの移乗補助
車いすへの移乗補助
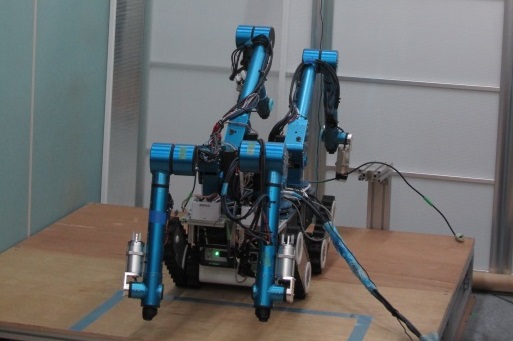
LabツアーⅡ:【災害対応ロボットOCTPUS】
120-5号館研究開発センター113室 担当:修士2年片野貴裕さん
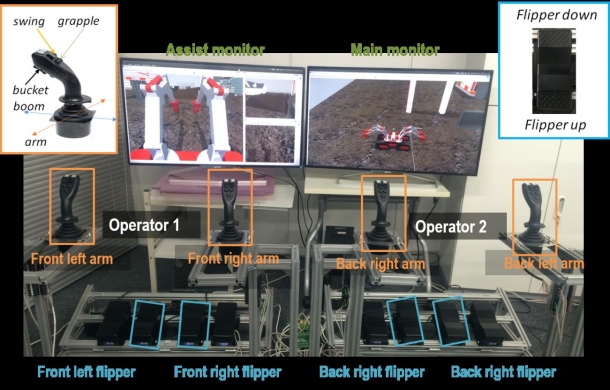
災害現場では、急斜面や瓦礫の上などの危険な場所で複雑な作業をすることが求められます。現在は大型機械や人の手で作業が行われていますが、大型機械では狭い場所に入れない、複雑な作業ができないなどの問題があります。一方で、人では力不足、危険などの問題があります。そこで、災害現場で効率的に作業をするために災害対応ロボット、OCTOPUSが開発されました。
OCTOPUSは4本のアームと4台のフリッパー、2台のメインクローラを持ちます。4本のアームと4台のフリッパーに機能的な冗長性を持たせることにより、体格の増大を抑えつつ、作業性と踏破性を両立することができます。すなわちOCTOPUSは、4本のアームを用いて複雑な作業ができるだけでなく、瓦礫や石のあるような平坦でない地面や斜面の走行、段差の昇降などの踏破能力を有し、瓦礫の除去、倒木の除去、消火作業などをはじめとして各種の現場における活用が期待されています。
OCTOPUSの操作は複数人でのマニュアル操作が基本となっておりますが、一部を自動化した1人での半自律操作システムも開発しております。また、油圧型と電動型の2種類のタイプを開発しております。油圧型は主に屋外で大きな力が必要なとき、電動型は室内などのより狭い環境で複雑な作業する必要があるとき、というように様々な環境や様々な作業に対応することができます。
LabツアーⅢ:【次世代知能化車両インターフェース】
120-5号館研究開発センター306室 担当:修士2年河野陽大さん
自動運転を代表とする次世代知能化車両の社会導入が進められています。自動運転技術はドライバーの負担を軽減することで安全を実現しますが、一方で運転操作の柔軟性や楽しさは薄れてしまいます。そこで、自動運転をベースにドライバーが右左折等のドライビングタスクを入力し車両を制御する半自動運転が重要と考え、研究を行っています。そして、半自動運転においてヒトとクルマを繋ぎ、操作を行うことのできるヒューマンマシンインタフェース(HMI)の開発・提案をしています。自動運転車両が実現した未来を見据えた研究はまだ殆どなされていません。その中で早稲田大学は最前線で研究をしています。
本日はタッチパネル型HMIのデモが行われました。このHMIはドライバーが地図上の行きたい場所をタップすることでその場所までのルートが生成され、その後システムが車両を制御します。その際にアイコンやルートが画面上に表示され、同時に音を発生させることでドライバーとコミュニケーションを行います。このHMI以外にもハンドジェスチャーを用いたHMIや力覚フィードバックを有するレバー型HMIのビデオによる紹介がありました。


機構紹介およびインタビュー
次世代ロボット研究機構 機構長 大谷淳(理工学術院教授)
顧問 山川宏 早稲田大学名誉教授
120-5号館研究開発センター121会議室
最後に、山川宏名誉教授、大谷淳機構長への取材が行われました。
山川名誉教授から、次世代ロボット研究機構の創設から現在までのあゆみの説明があり、山川名誉教授は次世代ロボット研究機構のビジョンである「ロボットと人間の共生」について次のように熱く語りました。
これまでの多くのロボットに関する研究成果を集約してさらに発展させた「早稲田大学次世代ロボット研究機構」。日本社会が抱える多くの課題、超高齢社会、人との共創、災害の復旧、ヘルスケアや福祉などへのロボット技術の活用をさらに加速していくことを目指しています。
早稲田大学次世代ロボット研究機構のその他プロジェクトは以下をご参照ください。
https://www.waseda.jp/inst/fro/research/project/