世界最大!筋肉で動くバイオハイブリッドハンド
発表のポイント
- これまで1センチメートルほどの大きさが主流だったバイオハイブリッドロボットで、現時点で世界最大となる18センチメートルの「多関節バイオハイブリッドハンド」を開発しました。このハンドは多筋組織アクチュエータ(MuMuTA)を動力源としており、5つの指が独立に動くようになりました。
- 培養筋組織を太くすると収縮力が高くなり中心部細胞には壊死が生じてしまいます。これがこれまで筋駆動アクチュエータ設計の課題でした。しかし、今回、複数本の細い筋組織を束ねる新しい構造を採用することで、高収縮力と高収縮率の両立の実現に成功しました。
- この技術は、生体組織を直接用いた大型のバイオハイブリッドロボットへの応用のほか、筋収縮で動く義手の開発、薬物試験モデルなど、工学分野から医療分野までの幅広い新たな応用が期待されます。
概要
東京大学大学院情報理工学系研究科の竹内昌治教授、早稲田大学理工学術院基幹理工学部の森本雄矢准教授らの研究グループは、ヒト由来の培養筋組織を用いた多関節バイオハイブリッドハンドを開発しました。この研究では、細い筋組織を搭載するシートを「寿司ロール」のように巻いて束ねることで、高い収縮性能を有する多筋組織アクチュエータ「MuMuTA」(図1)を実現しました。「MuMuTA」を駆動源として用いることで、多関節リンク構造を有する指の屈曲動作や物体操作を可能にしました。
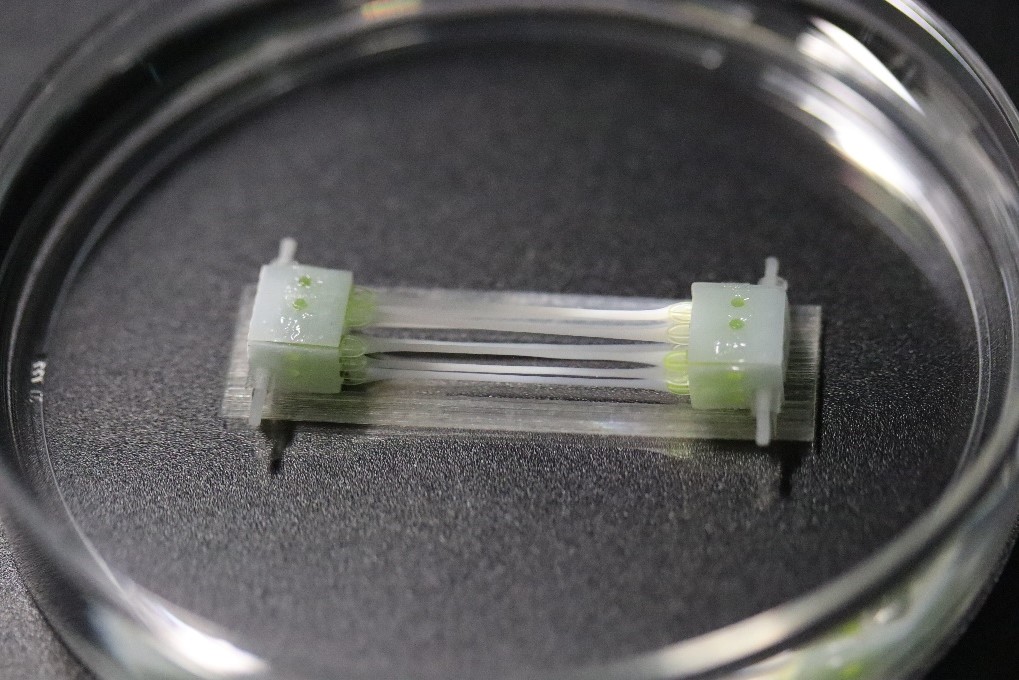
図1:多筋組織アクチュエータ
従来のバイオハイブリッドロボットは単一の関節駆動が主でしたが、本技術はそれらを大幅に超える機能性を備えています。義手やロボットのさらなる発展が期待されるとともに、医療分野での新しい応用可能性が拓かれると考えられます。

図2:バイオハイブリッドハンド
発表内容
従来のバイオハイブリッドロボット(注1)の研究は、主に1センチメートル程度の小型ロボットが限界で、単純な構造体であり1つの関節やヒンジを駆動するだけでした。このため、より大きな構造物を動かすことはできませんでした。大きな構造を動かすためには、より高い出力と長い収縮距離を持つ筋駆動アクチュエータ(注2)が必要ですが、筋肉を太くすると栄養供給が不十分となり、中心部で細胞が壊死する問題がありました。
本研究では、この課題を解決するために、「多筋組織アクチュエータ(MuMuTA)」(注3)を開発しました。MuMuTAは複数の細いヒト培養筋組織(注4)を束ねる構造を有しているため、組織一本一本の栄養供給を確保し壊死を防ぎつつ、組織を細くすることで筋線維の配向性が向上可能です。これにより、MuMuTAは約8 mNの高収縮力と約13%の高収縮率といったより優れた収縮性能を実現することができました。また、MuMuTA内のヒト骨格筋組織は10分連続駆動すると疲労し、1時間休んだら回復するといった疲労・回復特性も再現することができています。
さらに、このMuMuTAとロボット骨格の組み合わせにより、従来より一桁以上大きな18 センチメートルのバイオハイブリッドハンドの実現に成功しました。このハンドに搭載された指は多関節リンク機構を持っており、MuMuTAの直線的な収縮運動をワイヤ駆動機構によって関節の回転動作に変換することで、多関節の指を動かすことに成功しました。また、各指を独立して制御し、多様な動作が可能であることが実証されました。
加えて、バイオハイブリッドハンドを用いた実験では、複雑なジェスチャーの再現だけでなく、ピペットチップのような小さな物体をつかみ動かす複雑な操作にも成功しました。この成果は、より大規模なバイオハイブリッドロボットを実現するための重要なステップであるといえます。単なる技術革新にとどまらず、筋収縮で動く義手や筋組織を用いた薬物試験モデルなどの開発や筋骨格モデルの理解に大きく貢献するとともに、ロボット工学や組織工学、生体工学の分野にも新たな視点をもたらすことが期待されています。
特に注目すべき成果として以下が挙げられます。
◆新しい筋駆動アクチュエータの構造:高出力かつ長い収縮距離を持つアクチュエータの設計指針を提供
◆多関節機構の駆動:単一関節のロボットを超え、より複雑な動作を実現
◆独立制御可能な指を持つロボット手の構築:単純な動作から複雑な操作への進化を実現
〇関連情報:
「プレスリリース①世界初!筋肉で動く二足歩行ロボット」(2024/1/27)
https://www.u-tokyo.ac.jp/focus/ja/press/z0114_00036.html
「プレスリリース②世界初!生きた皮膚で覆われたロボット」(2022/6/10)
https://www.u-tokyo.ac.jp/focus/ja/press/z0114_00019.html
「プレスリリース③筋肉と機械が融合したバイオハイブリッドロボットを開発」(2018/5/31)
https://www.iis.u-tokyo.ac.jp/ja/news/2916/
発表者・研究者等情報
東京大学大学院情報理工学系研究科知能機械情報学専攻
竹内 昌治 教授
兼:東京大学生産技術研究所 特任教授(学内クロスアポイントメント)
東京大学国際高等研究所ニューロインテリジェンス国際研究機構 主任研究員
任 新竹 大学院生(修士課程)
早稲田大学 理工学術院 基幹理工学部 電子物理システム学科
森本 雄矢 准教授
兼:東京大学大学院情報理工学系研究科 客員研究員
論文情報
雑誌名:Science Robotics
題 名:Biohybrid hand actuated by multiple human muscle tissues
著者名:Xinzhu Ren, Yuya Morimoto, and *Shoji Takeuchi
DOI :10.1126/scirobotics.adr5512
研究助成
本研究は、JST 未来社会創造事業JPMJMI20C1、科研費「基盤研究S(課題番号:P21H05013)」、「創発的研究支援事業(課題番号:JPMJFR222Q)」、UTEC-UTokyo FSI Research Grant Programの支援により実施されました。
用語解説
(注1)バイオハイブリッドロボット
生体組織と人工素材を融合させたロボット。筋肉、皮膚、神経などの生体組織を利用することで、従来の機械ロボットにはない柔軟性や自己修復能力を持つ点が特徴。
(注2)筋駆動アクチュエータ
筋肉組織の収縮力を動力源として利用する駆動装置。電気刺激や化学刺激を通じて動作し、生体のような滑らかな動きを実現する技術。
(注3)MuMuTA:Multiple Muscle Tissue Actuator
「多筋組織アクチュエータ」の略称。複数の細い筋組織を束ねることで高い収縮力と長い収縮距離を実現し、複雑な動作が必要な多関節構造の駆動に適している。
(注4)ヒト培養筋組織
ヒト筋芽細胞を3次元的に集積した状態で培養することで作られたもの。ヒト筋芽細胞が融合して形成されるヒト筋線維の集合体となっている。生体の骨格筋と同様の収縮運動や代謝を再現可能である。