ヒトと社会の未来を想う深遠なるロボット工学の世界
なぜヒト型でなければならないのか。約60年前、故・加藤一郎教授によって研究が始められて以来、各界からの問いに応えるかのように進展を続けてきた日本発のヒューマノイド(人間型ロボット)開発。早稲田大学はその起点となり、産学の英知を交えながら世界の研究をリードしてきました。ヒューマノイド研究所所長の高西淳夫教授に振り返っていただきます。
◆早稲田が切り拓いてきた人間型ロボットの最前線
──早稲田大学はヒューマノイド(人間型ロボット)の研究で世界をリードしてきました。これまでの経緯についてご紹介ください。

高西淳夫(所長/理工学術院教授)
日本のロボット工学を切り拓いた故・加藤一郎教授によって、ヒューマノイドに関する最初の研究が早稲田大学で始まったのが1960年代の後半でした。学科横断の「WABOTプロジェクト」が70年に立ち上がり、73年には世界初のヒト型二足歩行ロボット「WABOT-1」が完成。84年になるとピアノを演奏する「WABOT-2」が登場して、翌年の「つくば科学万博」にも出展されました。この2体のロボットは今も西早稲田キャンパスの63号館に展示されています。
加藤先生の研究室で私が初めてロボット工学に触れたのは77年。理工学部の学生でした。それから大学院に進み、加藤先生のもとで研究を続けながら、新しい要素技術を織り込んだロボットシステムが次々に生まれる場に立ち合いました。ネットワークと接続可能な二足歩行ロボットの「WABIAN」や、人間の発声メカニズムを再現した発話ロボット「WT」、人間らしい情動を全身を使って表出する「KOBIAN」というように。
初期のヒューマノイドはもちろん、今の先端技術からすれば動きもぎこちなく稚拙なものでしたが、それでも世界に前例のない革新的な挑戦であったことは間違いありません。加藤先生は偉大な業績を遺して94年に逝去されましたが、私たちがその遺志を継ぎ、ヒューマノイドに関する多くの基盤技術と、それを支える有能な人材を数多く送り出してきました。ヒューマノイド研究所が発足したのは2000年4月。高度情報化社会における人間と機械の新しい関係を追究するその精神は、2020年にプロジェクト研究所として新たに発足した現在のヒューマノイド研究所にも綿々と受け継がれています。
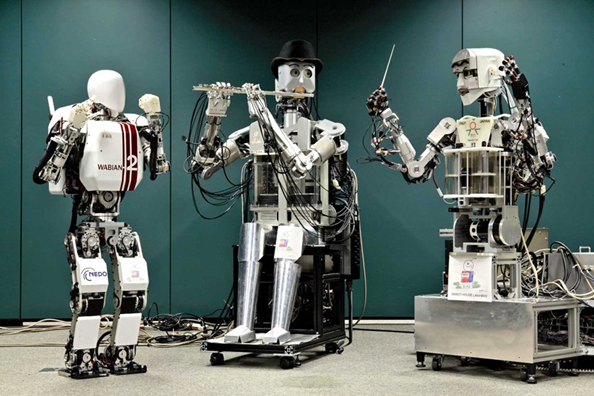
1970年代以降、早稲田大学が起点となって多彩なヒューマノイドが次々に誕生。
──1960年代といえば、まさに「鉄腕アトム」の時代ですね。加藤先生はロボットが「人間型」であることにどんな意味を求めたのでしょうか。
当時の日本は高度経済成長期を迎え、製造業が勢いよく成長を始めた時期でした。エンジニアリングの技術が進展し、オートメーションによって工場の生産力はどんどん上がっていきました。おそらく製造業はこのまま伸びていく。では、その次を担う技術、応用できる分野は何だろう。そう考えたとき、加藤先生が着目したのがサービス産業だったといいます。
サービス業の担い手は人間です。その技術を開発するには、人間の身体の動かし方や五感の使い方といったものを工学的に解明する必要がありました。しかし、そのような先行研究は世界中のどこにもありません。ならば、自分たちで「ヒト」をつくってみよう。そんな発想が出発点になりました。
その頃、ヒトの手や腕の動きを代替するような産業ロボットはすでに出はじめていましたが、足や脚は未開発です。そこで、まず股関節や膝、足首などの動きを機械で再現し、次にそれを左右に並べて二足歩行の原型をつくる。さらにそこに上半身をつなげて全体を一つに統合する。そんな手順でヒューマノイドの研究が進んでいきました。
◆人間とロボットが共存する社会の到来に向けて
──身体の動きや情動についての研究がベースにあるということは、関連する課題やテーマも多岐にわたって広がりそうです。
そうですね。最初はサービス業での応用を念頭に始まった研究ですが、いろいろと追究していくと、ロボット工学の視点から人間そのものを理解することへと、アプローチの幅が広がっていきました。すると工学だけでなく、サイエンスの視点も必要になる。人間を科学するための道具としてのヒューマノイド。加藤先生がそんなふうにおっしゃっていたのを覚えています。先生はのちに、早稲田で人間科学部の創設にも携わりました。
そもそもヒューマノイドは、人間と同じような行動パターンを持ち、人間と同じ生活空間で作業をともにしながら違和感なく共存することを目標とするロボットです。家事や介護、スポーツ、エンターテインメントといった、日々の暮らしに密着した領域に広く役立つものでなければなりません。工学はもとより、生物学や心理学、医学、社会学など、人間に関わるあらゆる学問分野との連携が求められるのもそのためです。
──ホンダが2000年に発表した二足歩行ロボット「ASIMO(アシモ)」の登場は、そんな未来を予感させるような出来事でした。
ヒューマノイドが社会に認知される一つのきっかけになりましたね。ホンダはそれ以前にも「P2」「P3」という試作版を発表して、世界の研究者から注目を浴びました。90年代にはそうした企業の開発も盛んになり、ソニーからも99年にペット型ロボットの「aibo(アイボ)」が出て、翌年にはヒューマノイドの「Qrio(キュリオ)」が発表されました。実はその開発過程で早稲田の研究チームにも声が掛かり、私もよく加藤研究室の先輩たちが働くソニーの研究所に通ったものです。そうした先見の明ある企業との共同研究は本当にありがたく、今思い出しても感謝の念に堪えません。
というのも、80年代ぐらいまではヒューマノイドに対する世界の目は厳しく、ヒト型の機械が現実社会の中に入っていく未来は考えられないといった見方が大勢でした。私も学生時代、なぜ役に立たないものを研究するのかと言われたほどです。二足歩行のロボットなんて必要ない、車輪とキャタピラを使えばいいだろうと。
ですが今、周知のようにヒューマノイドは世界中から注目され、米国や中国の資本が巨額を投じて開発を進めるようになりました。トレーニングやリハビリテーションの分野でも期待されています。「ロボカップ」をご存じですか? 自律移動型ロボットによる競技会で、2050年までにサッカーの世界チャンピオンチームと戦って勝つことを目標にしている活動です。そんな夢のような話も生まれるほど、いろいろな分野へと発想が広がってきています。
◆スポーツ、医療、農業など、限りなく広がるロボット活用の可能性
──高西先生ご自身はどのような研究を中心になさってきたのですか。
以下の2つの視点に沿って研究を進めてきました。
①ヒトの形態と機能を模したヒューマノイドを設計・製作し、これを用いて心身両面における人間の行為・行動や機能を再現することで、ヒトの工学モデルを構築する「ロボット工学的人間科学」
②その応用として医療・福祉・災害対応・教育支援など、人間に関わるロボットシステムに関する演繹的設計論の構築を目指す「人間モデル規範型ロボット工学」
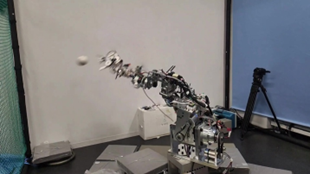
ピッチング動作研究のために開発されたロボット上半身
具体的なテーマを細かくいえば枚挙にいとまがないのですが、わかりやすいところで挙げると、スポーツの訓練や医療教育、農作業支援などに関する研究開発があります。これらはプロジェクト研究所としてのここ5年間の活動テーマにも合致するものです。
まずスポーツ分野では、投擲や跳躍・走行、重量物の持ち上げといった基礎的な運動動作の再現を目指し、ヒューマノイドを用いて動きの大きさやスピードを変化させた実験を行っています。具体的には、ボールのピッチングを可能にするロボット上半身部の開発。腰のひねりを生かしつつ、肩の弾性や腕の振りを効果的に使って体幹部から手先へとエネルギーを伝達する投球の仕組みを再現しました。こうした研究はスポーツ科学の研究者と連携することにより、例えば大谷翔平選手のようなスーパーアスリートの養成にも生かせるでしょう。

日本ロボット学会からも高い評価を得た新生児蘇生法トレーニング・システム
医療分野では、臨床手技の実習に使える患者ロボットを開発し、熟練者の動作や知覚、意図するところを訓練者にフィードバックする方法について研究しています。ロボットによる症例の再現や、手技の評価にもつなげます。例えば、妊婦さんが分娩する際の緊急時に備えた新生児蘇生法というのがありますが、そのトレーニングシステムを開発し、日本ロボット学会から優秀講演賞(2020年度)と優秀研究賞(2021年度)をいただきました。
また、農業関連では太陽光発電に使うパネルの下が空洞になっていることに着目し、ロボットを活用してここで農作物をつくることで、緑化によるCO2吸収とエネルギー生産を両立させるプロジェクトを始めました。畑の畝に沿ってロボットを自律走行させたり、収穫物を認識して摘み取ったり、雑草を選り分けたりといった作業を可能にする技術の基礎研究を進めています。
──企業との共同研究で製品化され、実際に販売されているロボットもありますね。

京都科学によって製品化された縫合手技評価シミュレータ(画像提供:株式会社京都科学)
はい。医療教育用では特にそうした事例が多いですね。もともとは治療そのものに使える手術ロボットなどの開発を進めていて、その分野でも日本が世界に先駆けていたのですが、残念ながら今は欧米や中国に水をあけられているのが実状です。日本の場合はどうしても社会制度を整えるのが後追いになりがちですから、出発点はよくても社会に実装されるまでに時間がかかり、気がつけば海外に先を越されていたということがあるんですね。そこで、我々もある時点で教育用に舵を切りました。
最初に手掛けたのは、外科手術のための縫合手技評価シミュレータです。手術の後の縫合は針掛けと糸結びの連続ですが、熟練した外科医のようにできるまでには相応の訓練が必要です。医学生が自分で練習して評価も得られる機械があれば役立つだろうと、京都科学という医学・看護教育教材で知られる企業と一緒に開発しました。人間の皮膚を模した素材にセンサーを埋め込み、手技を実践しながら技能の度合いを計測・評価することができます。これは10年ほど前に製品化され、今も同社で販売しています。

テムザックが販売するデンタロイド(画像提供:株式会社テムザック)
歯学部生の実習用に開発したデンタロイドもあります。患者ロボットですね。音声認識機能を持たせ、指示に従って口を開けたり顔の向きを変えたりする。患者さんの咳き込みや、反射的に嘔吐しそうになる様子も再現可能なシミュレータです。こちらは昭和大学や工学院大学の協力も得て、オキノ工業ロボティクスという企業が持つ特許技術をもとにテムザック社によって製品化されました。
◆学術界、産業界で活躍するWASEDAの人とテクノロジー
──いろいろな研究者や専門家、企業との連携によって、ヒューマノイドの活躍の場が広がっているのですね。
そうですね。かつては散々な言われ方をした時期もありましたが、懸命に努力をして研究を続けていると、こうして声を掛けてくださる人たちが現れ、だんだんと仲間が増えていく。天上の加藤先生も満足しておられるんじゃないかな。苦労をともにしてきた方々とは今も年に何度か顔を合わせ、食事をしながら意見交換をしています。世の中の動きを見て、これからどんなロボットが求められていくのだろうかと。
──何か新しい展開を考えておられるのですか?
私自身は間もなくして定年を迎えたら研究室を閉めることになりますが、後に続く研究者がどんどん育ってきています。外国からここに来て学び、新しいことを始めた人も大勢います。中国とドイツの学生が卒業後に立ち上げた、LP-RESEARCHというベンチャー企業もその一つです。VR(仮想現実)やAR(拡張現実)といった分野に用いるセンシングシステムを開発しています。今ここにいる林家宇(Lin, Jia-Yeu)さんは台湾から来ていて、人間型サキソフォン演奏ロボットなどの研究で博士号を取りました。今は創造理工学部の講師です。
こういう有能な若い世代が、それぞれの専門を生かして社会に役立つ新しい技術をつくっていってもらえたらうれしいですね。それには人間や社会に関する研究が欠かせません。そこで生まれた発見が、新しい機械の発想へとつながっていく。例えば、車椅子に代わる二足歩行ロボット椅子や、被災地で役立つ災害対応ロボットのように。そしてそれを実社会に組み込むための制度づくりを、行政が迅速に進めてくれることを望みます。
高西研究室から生まれた人間型サキソフォン演奏ロボットとともに。右からヒューマノイド研究を受け継ぐ理工学術院講師の林家宇さんと、修士課程2年生の國谷大樹さん。