新人研究リサーチアドミニストレーターのウーラ(WURA;Waseda University Research Administ-rator)が、早稲田大学の研究者が出展・講演しているイベントに参加して、みなさんに研究内容をご紹介していきます。

こんにちは、ウーラです!! 今日は大学発新産業創出プログラムSTART技術シーズ選抜育成プロジェクト〔ロボティクス分野〕の試作品展示会「Robotics×Future 2016」(2016年3月18日(金)10:00-17:30、於:ベルサール汐留B1 HALL)に来ています。STARTは、国立研究開発法人科学技術振興機構(JST)のプログラムで、大学の研究と事業化のノウハウを持つ専門家とをつないで、研究の事業化を支援するものです。このイベントでは、選ばれた18チームが一堂に会し、試作ロボットの展示・デモンストレーションが行われています。なんと、早大からは3チームも選ばれているんですよ!さっそく、ブースに行ってみましょう。
口腔ケア補助ロボットの開発

チームリーダー・栄田源さん
生命理工学専攻修士1年生
くわえるだけで歯磨きができるマウスピース型ロボットを開発しました。介護施設での利用を想定していますので安全第一です。そのため、顎がしっかり乗っているときだけ動作するように、顎置きスタンドに力センサを内蔵しました。また、“くわえるだけ”の標語通り、マウスピースへの適度な給水と口内からの排水も全自動です。ロボット自体は共通で1台導入していただき、個人の好みやサイズに合わせてスポンジ型やブラシ型など選べるマウスピースだけ、個別に差し替えて使う仕様にしています。
ふつうの歯ブラシのように、気軽にこのロボットを使っていただけるよう、改良を加えていきます。これからの介護に“歯ッピー”を届けたいですね。
 介護者・要介護者双方の負担軽減、が根底にあるそうです。将来は病院や医療現場、さらに一般向けへのポータブル化を目指してるそうです。ウーラもいつか使う日がくるかもしれないですね。栄田さんのチームとシュミッツ助教のチームは、起業家マインドや事業化ノウハウなどを学べるWASEDA-EDGE人材育成プログラム(文部科学省の事業のひとつ)のビジネスモデル仮説検証プログラムエッセンシャルコースを経て、このプロジェクトに応募し、採択されたそうです。
介護者・要介護者双方の負担軽減、が根底にあるそうです。将来は病院や医療現場、さらに一般向けへのポータブル化を目指してるそうです。ウーラもいつか使う日がくるかもしれないですね。栄田さんのチームとシュミッツ助教のチームは、起業家マインドや事業化ノウハウなどを学べるWASEDA-EDGE人材育成プログラム(文部科学省の事業のひとつ)のビジネスモデル仮説検証プログラムエッセンシャルコースを経て、このプロジェクトに応募し、採択されたそうです。
WASEDA-EDGE以外にも、早大では専門分野の枠を超えた多様な教育プログラムを開講しているので、いろいろ探してみてくださいね。
目の開度を入力としたUI(ユーザインタフェース)開発

チームリーダー・島聡志さん
総合機械学科4年生
目の開き方を感知してディスプレイ上の画像を拡大・縮小できるソフトウェア「ZoomingEye」を開発しました。両手がふさがっているとき、たとえば車の運転中に地図を拡大したい、あるいは料理中にレシピを拡大したい、と思ったことはないでしょうか。人の行動心理として、物が見えにくいとき(物をもっとよく見ようとするとき)目を細めるというものがあります。こちらの行動はみなさんにとってもなじみがある行動ではないしょうか。ですから、「ZoomingEye」は目を細めると拡大し、見開くと縮小するという直観的な動作で画面を操作できるようにしました。
ごく一般的なWebカメラで適用でき、目の大きさなどの個人差には自動的に対応する新しいアルゴリズムも組み込んでいます。現在はPC上での動作ですが、今後は本格的に、メインターゲットとしているスマホアプリ化と、視点認識等のUIと組み合わせていくことで、目を細めると自分が見ている部分が拡大されるなど、より直感的なUIを実現していく予定です。
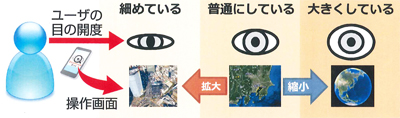

ウーラもWEB上の地図を拡大・縮小するデモに参加させてもらいました。思っていたよりも断然スムーズに、目の動きに追随して画面が動いてくれました。慣れればとても便利ですね!
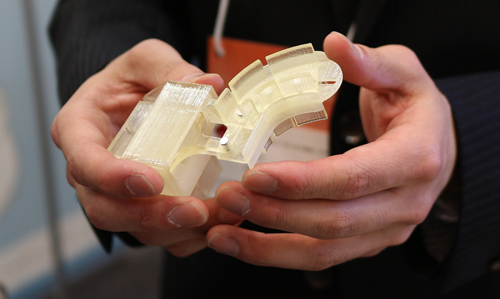
動作軌道の直接教示が容易で柔表面構造を有する安全なロボットアームの開発

チームリーダー・シュミッツ アレクサンダー助教
動作軌道を簡単に設定でき、人に安全なロボットアーム「Nicebot」を開発しました。人の腕と同じ7つの関節があるため、直観的に動作を思い描くことができます。動作設定はプログラミングではなく、アームを動作点に持っていき、PC画面上で動作を選ぶだけ。どなたでも簡単に扱えますから、頻繁に作業が変わる受注生産などの製造現場や生産ラインなどでの利用を想定しています。さらに、アーム表面は柔らかく、人が衝突したとしても怪我をする危険はありませんし、衝突時には動作を一時中断します。衝突した対象が離れると、またそこから動作を再開するシステムを導入しています。


「Nicebot」は4.5kgまでのモノを運べます。ブースでは、ピック・アンド・プレイスと衝突デモが行われていました。動作がとても素早く、なめらかでした。今まで「緊急停止」はありましたが、センサによって状況判断して自動再開するというのは「Nicebot」ならでは、ですね!
今日は、若手人材が取り組む研究をご紹介しました。