Disaster-response robot climbing ladders to your rescue
Mon, May 16, 2016-
Tags
A two-legged robot 12 times faster than before to vertically move across a ladder
A new algorithm for creating a robot for disaster response under the Tough Robotics Challenge
As part of the Tough Robotics Challenge (TRC), Professor Atsuo Takanishi of the Faculty of Science and Engineering, Assistant Professor Kenji Hashimoto of Waseda Institute of Advanced Study, and Mitsubishi Heavy Industries created an algorithm for a bipedal robot to climb up and down a ladder 12 times faster than its previous model. The goal of this robot is to function autonomously during large-scale natural disasters and assist building safety inspections in places such as power plants for disaster prevention.
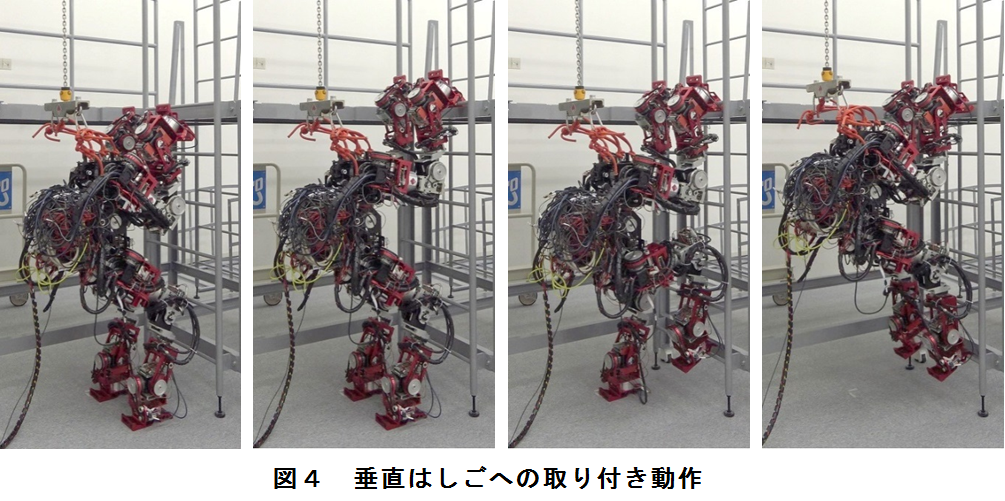
In the previous version, the robot consumed much time due to its structural framework. The robot only moved one limb at a time while supporting itself from sliding down with the remaining three limbs. In addition, the robot required human assistance for set up at the beginning. After taking into account the robot’s movement, the team created a new algorithm. The robot can now move two limbs at a time (left arm and leg, right arm and leg, or left arm and right leg and vice versa).
Furthermore, the robot can now latch itself onto ladders with more stability. There is a possibility for this robot in the future to move across rough terrains unaided and prevent itself from falling despite faltering conditions of natural disasters.
TRC is part of the ImPACT Program, an initiative through the Council of Science, Technology and Education of the Cabinet Office.










