Waseda Frontline Research Vol. 16: Assistive robot technology to expand human functions (Part 4 of 4)
Wed, Sep 6, 2017-
Tags
Hiroyasu Iwata, Professor, Faculty of Science and Engineering, Waseda University
Global Robot Academia Laboratory Director
Specialization: Medical welfare robotics and mechatronics
The Future of Human Assistive Robots
 Professor Iwata is working on various research around the concept of human assistive robot technology (RT) to expand physical performance and functions. So far, this series of interviews by the Center for Research Strategy has covered various robot technologies that contribute to medicine and welfare. In the fourth and final part, Professor Iwata talks about his aspirations and future outlook as a researcher.
Professor Iwata is working on various research around the concept of human assistive robot technology (RT) to expand physical performance and functions. So far, this series of interviews by the Center for Research Strategy has covered various robot technologies that contribute to medicine and welfare. In the fourth and final part, Professor Iwata talks about his aspirations and future outlook as a researcher.
Prenatal ultrasound remote examination robots
We are conducting research on practical medical robotics to realize human assistive robot technologies for practical use that benefit society. One example is prenatal ultrasound remote examination systems. While the number of medical facilities is decreasing year by year, utilizing robots can allow pregnant women to receive ultrasound examinations at their local medical clinics and reduce the physical burden they face. Automatic scanning also generates ultrasound images, which are sent to obstetricians at remote hospitals where they can perform AI image diagnosis to check for abnormalities, as well as detailed diagnosis by remote operation of the ultrasound examination system, if necessary.
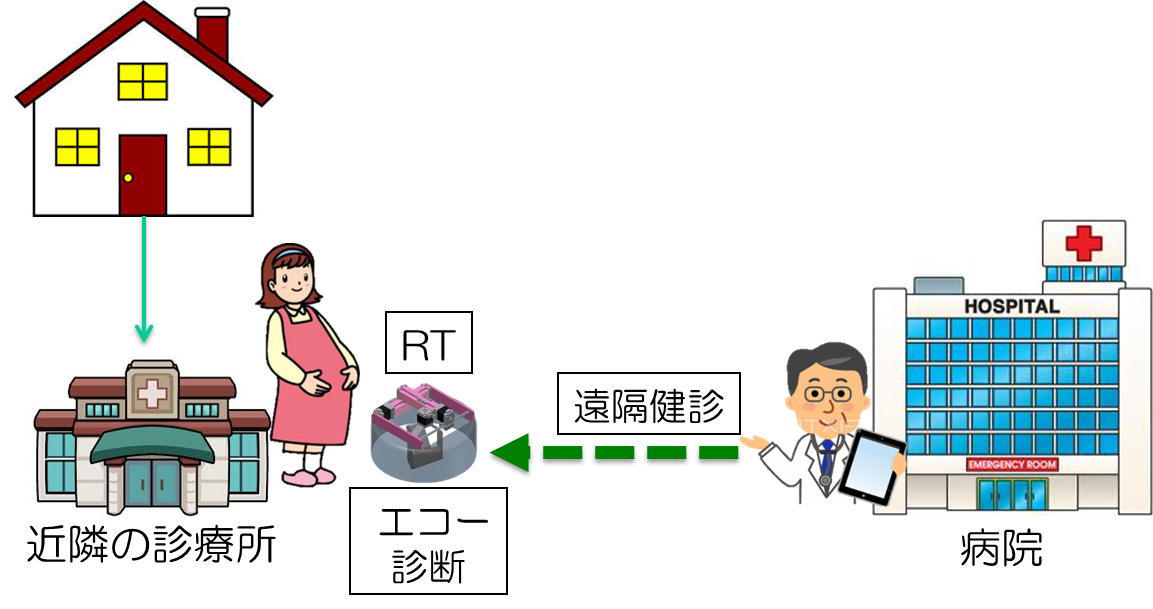
Figure: A prenatal ultrasound remote examination system (source: Iwata Laboratory)

Photo: Testing with an actual pregnant woman (source: Iwata Laboratory)

Photo: A prenatal ultrasound remote examination robot. Focusing the weakness of the contact force to the belly and a clear uterine ultrasound image.
Since the size of a pregnant woman’s belly changes drastically week by week, this system features robot technologies that prioritize abdominal safety and application. By carefully arranging the position of robot joints and adopting a passive structure to minimize the contact force to the belly, we have been able to develop an advanced human-adaptive technology that makes it possible to obtain clear ultrasound images, including of fetuses, using a probe(*1) adapted to the round belly shape. The issue of being unable to perform diagnosis for pregnant women is often discussed on news programs and other media. I hope to make this robot available to pregnant women who have trouble seeing an obstetrician due to geographical and physical problems, as well as other reasons.
Developing technologies to prevent functional deterioration in elderly people
Japan’s society is super-aged, and more and more elderly people are going to experience functional deterioration as they age. While there exist technologies that work like sports training to increase a person’s skills from, for example, level 5 to level 10, I believe there will be needs for a tool that can recover, even if only a little, deteriorated physical functions that elderly people have lost with age. This is a technology that reverses change in the function level from negative to positive.
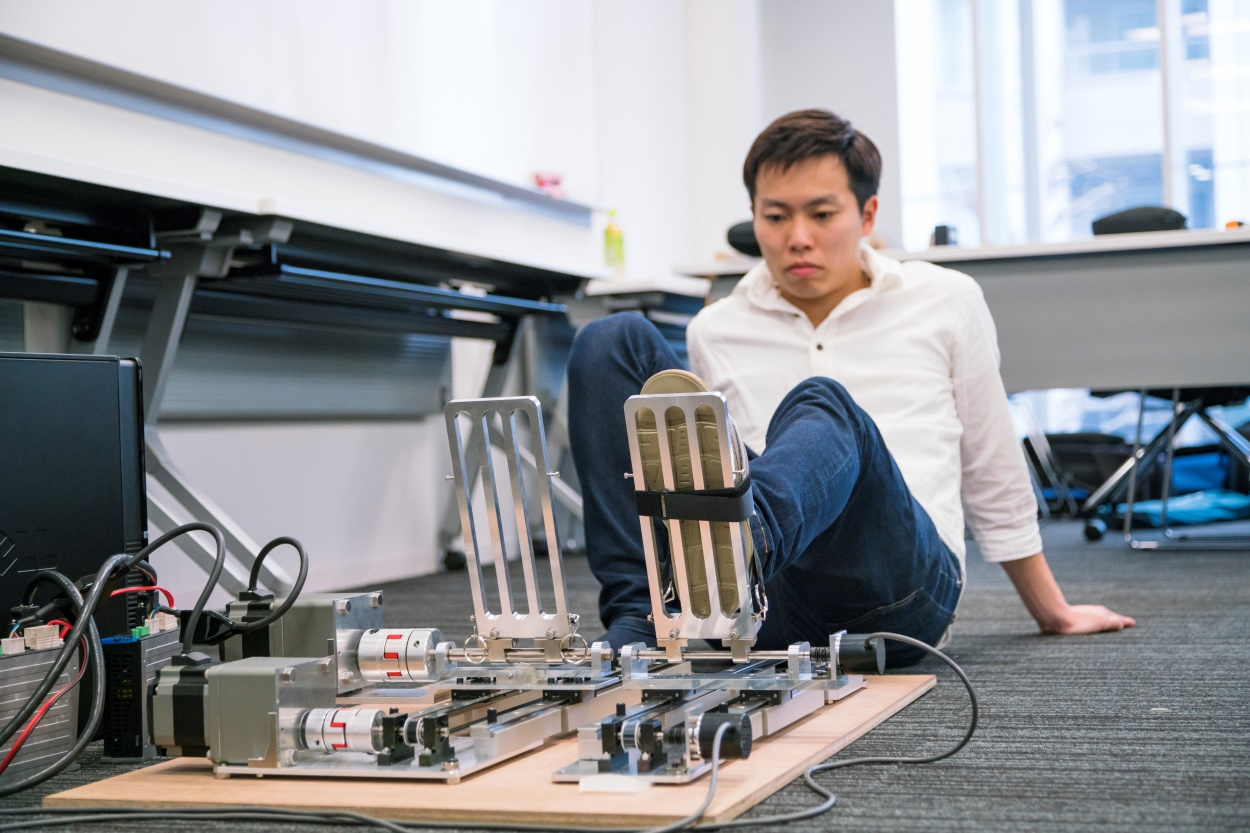
Photo: Motion exercise equipment for acute rehabilitation that allows users who suffer leg paralysis after a stroke to exercise their legs in bed. Users can exercise at their own pace.

Photo: A type of perception assistive equipment that remedies sensory disorders caused by hemiplegia, an after effect of a stroke. Patients with dulled senses can feel their feet at the back of their body as they practice walking.

Photo: Balance training robot technology. When the center of mass deviates, the belt around the waist vibrates as a notification, which helps sharpen the user’s sense of balance. It is expected that repetitive training can help improve balance unconsciously.

Photo: High-dorsiflexion assistive robot technology to improve hemiplegic walking. Paralysis makes the user’s leg droop and causes difficulty walking, but the leg is pulled up by artificial muscles to ease this difficulty and improve training effectiveness.
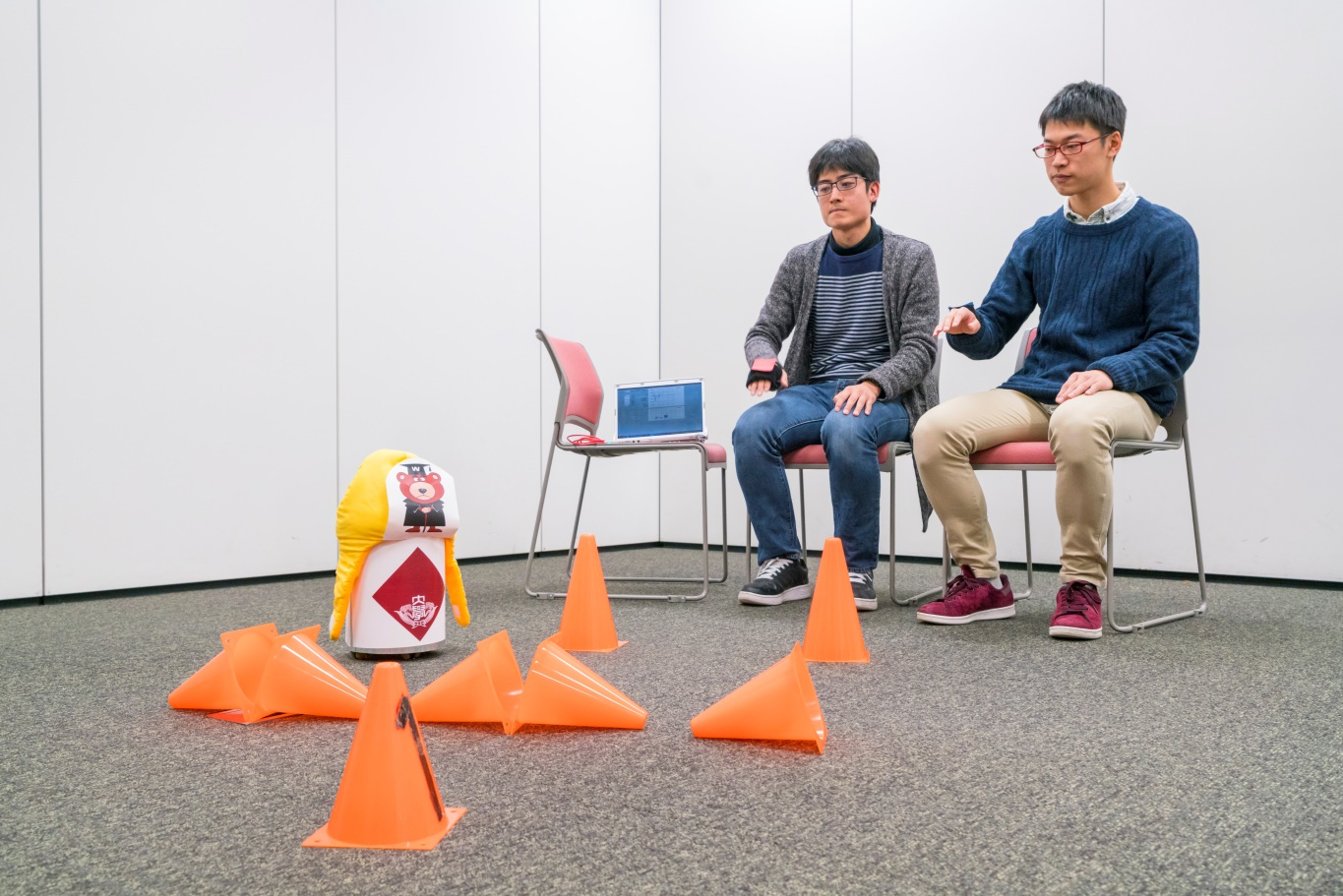
Photo: A dementia treatment/prevention robot that can be controlled with simple physical movements. Users can enhance their functions while enjoying games and other exercises. This can also strengthen self-sufficiency, which has a positive effect on the mental state.
We are working mainly on perceptive assistance, which is one technology to expand physical performance and function for elderly people. To expand the natural functions of human beings, it is effective to have assistance using technologies to sharpen tactile (touching the ground), visual, balance, postural, and other senses. The key to this assistance is technologies to enhance sensing and perception using robot technology. We are aiming to establish a fundamental technology called the “mind and body stimulative RT (robot technology),” which will use robots to notify users of improper physical status, guide them to the proper posture, and train their physical senses by repetitively teaching that state.
Bridging the gap between technology and solutions
In the world, there are all kinds of technologies. An important challenge for the future is to combine these technologies appropriately to solve specific problems. The success or failure of these tasks rests on the shoulders of system integrators, who happen to be the subject of my goal.
To solve the problems of a specific target, what kind of existing technologies should be combined? The important thing is to have the insight to see, in planned solution scenarios, what combination of technologies could be a realistic solution. To sharpen this insight, we will have to constantly be aware of the numerous problems our society faces. At the same time, it becomes essential to train your mind to broaden ideas while paying attention to new technologies, so that we can think about what kind of problems could be solved by applying our technologies. It is this very process that led to the biomedical devices mentioned in the first part of this series, the third-arm intuitive control interface from the second, and the sport technique learning assistive system from the third, as well as the medical robotics in this part.
Solving social problems with technology
Waseda University offers the best environment to conduct such advanced robotics research. At the Global Robot Academia Laboratory, experts gather from different fields including robotics, image processing, sound recognition, and space engineering, meaning that the level of each elemental technology available here is very high. With my team as a system integrator, we can create technologies that cover 0 to 1. Since speed is important, I always try to materialize whatever idea I come up with in about a year.
As a researcher at Waseda, I feel a strong sense of responsibility to live up to the expectations of society. Waseda University is a pioneer in robotics research. Dating back as far as 1973, Waseda Professor Ichiro Kato(*2) created a humanoid robot here. For this reason, the University has always been highly regarded in human-like robot and humanoid research, even outside Japan. As a researcher who is playing a part in the University’s robotics research history, I always keep in mind that I should continue producing research outcomes that will impact and contribute to society. Trying to do as much research as I can to contribute to solving social issues, I feel a deep sense of joy to be able to do so in an environment blessed with such history and potential. This has always been my mindset, and it always will be.


At Iwata Laboratory. The laboratory has several rooms. The photos above and below are from the Green Computing Systems Research Organization and the Center for Advanced Biomedical Sciences, respectively. Undergraduates, postgraduates, and other members come together as a team to continuously carry out new research projects.
Notes
(*1) Probe: A part of the instrument which is in direct contact with a pregnant woman’s body in an ultrasound imaging test
(*2) Ichiro Kato (1925 – 1994)
A pioneer in Japanese robotics, biomechanics, and humanoid research. After graduating from Waseda University’s Department of Mechanical Engineering, he became professor and dean at the Faculty of Science and Engineering.
Profile
 Professor Hiroyasu Iwata
Professor Hiroyasu Iwata
Professor Hiroyasu Iwata obtained his Ph.D. in mechanical engineering from the Graduate School of Science and Engineering at Waseda University in 2002. After serving as lecturer and associate professor, he was appointed professor at the Faculty of Science and Engineering in 2014, and laboratory director at the Global Robot Academia in 2015. Professor Iwata is a member of Japan Society of Mechanical Engineers (Delegate), Japan Society of Computer Aided Surgery (Trustee), Society of Biomechanisms Japan (Secretary), Robotics Society of Japan (Trustee), Japanese Society of Biofeedback Research (Executive Director), Society of Instrument and Control Engineers (Delegate), IEEE, EMBS and so on. Professor Iwata has earned a good reputation in Japan and overseas for his involvement in many cutting-edge research projects under the keyword of human assistive Robot Technology, including rehabilitation assistive RT, medical care assistive RT, sports learning assistive RT, intelligent construction equipment robotics, and RT using new materials. Contact the Iwata Laboratory for further details.
Major research achievements
- M.OKAMOTO,M.KUROTOBI,S.TAKEOKA,J.SUGANO,E.IWASE,H.IWATA,T.FUJIE,“Sandwich fixation of electronic elements using free-standing elastomeric nanosheets for low-temperature device processes” J.Mater.Chem.C,Feb,2017
- H.HAYATA,M.OKAMOTO,S.TAKEOKA,E.IWASE,T.FUJIE,H.IWATA,“Printed high-frequency RF identification antenna on ultrathin polymer film by simple production process for soft-surface adhesive device” Jpn.J.Appl.Phys.,vol.56,no.5S2,pp.05EC01,May,2017
- Ito K, Sugano S, Takeuchi R, Nakamura K, Iwata H,“Usability and performance of a wearable tele-echography robot for focused assessment of trauma using sonography” Medical Engineering and Physics,vol.35,no.2,p165-171,2013
- Iwata H, Sugano S,“Human-robot-contact-state identification based on tactile recognition” IEEE Transactions on Industrial Electronics,vol.52,no.6,p1468-1477,2005
- Iwata H, Sugano S,“Design of human symbiotic robot TWENDY-ONE”Proceedings-IEEE International Conference on Robotics and Automation,p580-586,2009










