"By working hard without giving up, I was able to acquire a wide range of skills."
Sota Amano, 2nd-year master's student, Graduate School of Advanced Science and Engineering
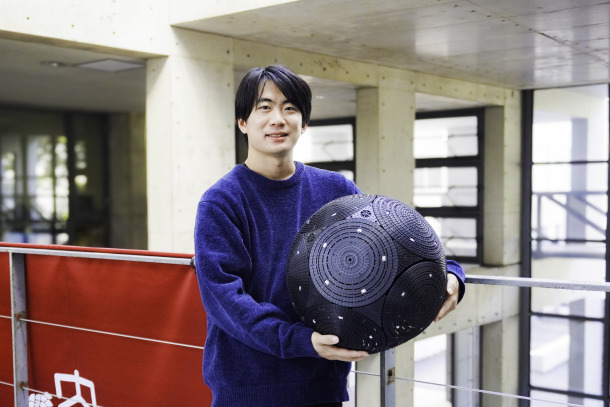
At Nishi-Waseda Campus Building 55. With "Sphebot"
Sota Amano has had an interest in machines since childhood and is currently working on robot development at the Sawada Hideyuki Laboratory in the Graduate School of Advanced Science and Engineering. He unveiled "Sphebot," an omnidirectional spherical robot designed for exploring disaster sites and uneven terrain. In September 2025, he won the top prize in Japan at the internationally prestigious James Dyson Award (JDA) 2025, out of over 2,100 entries from 28 countries around the world. We spoke to Amano, who has been involved in robot development since he was an undergraduate, about what sparked his interest in robots, the behind-the-scenes story of their creation, and his future outlook.
-What first got you interested in robots?

When he was a member of the rowing club in high school, he also repaired the microphone system they used.
It all started when I was in elementary school and my parents bought me a toy called "Fischertechnik" from Germany. It was a toy that we put together like Lego blocks, but it had sensors, motors, microcomputers, etc., and it was designed to teach us how machines and structures work. I think I became interested in robots while playing with it. Also, when I became a junior high school student, I started playing with computers in my free time between studying, and my favorite pastime was designing with CAD (※1) software called "SketchUp," which was provided free of charge by Google at the time.
(※1) Software for design and drafting.
-Why did you decide to submit "Sphebot" to the JDA this time?
It all started when I attended a JDA information session held on campus. When I heard about it, it sounded interesting, and I felt that the requirements for the competition would be a good match for the robot I was making. JDA places a particular emphasis on design, so I chose a prototype that suited the requirements and brushed up on the design. In the presentation video, I also paid particular attention to expressing the robot's movements.
I started working on "Sphebot" when I was a fourth-year undergraduate student, inheriting a robot that had originally been developed in a laboratory and working on the project alone. I thought that by making the body a deformable sphere that could be lifted by its legs, it would have the flexibility to overcome steps like a legged robot, as well as the smooth mobility of wheels, and could bring a new form of robot to the world.
An image of how "Sphebot" works. From the presentation video at JDA
--Please tell us your thoughts on winning the Japan Grand Prize at JDA2025 and the difficulties you faced throughout the award process.
Looking at the other entries, there were many fantastic ideas from all over the world, so I never expected that my work would be selected. So when I heard the results, I was really surprised, and I am extremely honored to have been selected as the grand prize winner from among all the other fantastic works.
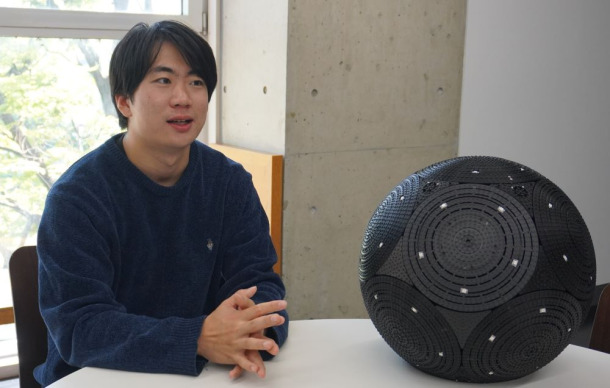
The actual "Sphebot"
The biggest challenge was managing my time. I was working on this project alone, so I had to do everything myself. Creating the CG for the presentation materials was particularly difficult; even with a high-performance PC, it was slow and often didn't work well. Also, even if the actual machine worked well in simulation, it often didn't work in reality, so eliminating those errors one by one was also difficult. However, by not giving up, I feel I was able to acquire a wide range of skills through these three years of research, not just JDA2025.
-First of all, how do you proceed with robot development?
Basically, I design using CAD and then repeat the process of prototyping. When simulations are required, I use 3DCG software to load the image into the space of the game development platform and perform physical simulations. Using these methods, I can bring the actual device closer to completion while checking whether it actually works and what it looks like. I repeatedly made prototypes using 3D printers in the lab and at home, verifying their operation, and it took me two to three years to finally arrive at the current design of "Sphebot."
Ideas for robots often come to me in my daily life. Especially when I'm driving a car, I often think, "It might be interesting if it moved like this," or "This arrangement seems like it would work well." The operating mechanism of this "Sphebot" was born from such an everyday inspiration.

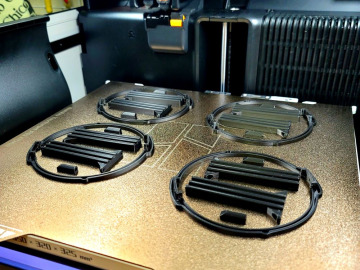
Left: Parts for "Sphebot" being made
Photo on the right: 3D printer used at home to prototype parts
-What are you studying at university?

A photo of Amano playing volleyball at university. Amano is in the center left wearing a Minami Tohoku Sotai T-shirt.
I graduated from the Department of Applied Physics in the School of Advanced Science and Engineering, where I learned a wide range of subjects, from basic physics to quantum mechanics and the theory of relativity. The Sawada Laboratory is centered on the applied field of measurement and information engineering and has also been focusing on research into control theory, shape memory alloys, and more recently deep learning (*2). In the lab, each member sets up a project and works hard at their research, constantly updating their knowledge by sharing papers they have found and discussing new technologies and discoveries with Research Associate and doctoral students. Although my days are busy with research, playing volleyball, which I have been doing since I was an undergraduate, is a good way to relax.
(※2) A type of artificial intelligence technology that automatically learns features from data.
-Finally, please tell us about your future prospects.
At JDA2025, I presented the completed concept, but I would like to continue my research, including using machine learning, to better control the random movement of the sphere as it rolls. Ultimately, I envision a robot that can recognize its surrounding environment, generate a map, and move as desired on any terrain, like the robot characters you see in anime and science fiction movies. However, due to time constraints, I would like to entrust my medium- to long-term goals to the new junior members of our lab and keep an eye on them.
I will be leaving the lab in about six months, so I plan to use the skills and experience I have cultivated so far to further expand my own possibilities. Even after I start working, if any interesting ideas come to mind, I would like to continue making robots.
912th
Interview, text and photography: Waseda Weekly Reporter (SJC student staff)
Rinka Nishimura, 3rd year student, School of Human Sciences
【Profile】

With his beloved MAZDA CX-5
He is originally from Aichi Prefecture and graduated from Aichi Prefectural Asahigaoka High School. During his high school years, he was a member of the rowing club and even participated in the Inter-High School Championships. Currently, his hobby is playing volleyball once or twice a week to keep fit. He also enjoys driving, traveling all over Japan and apparently drives around the world every year.




![[Save version] Map of the four main campuses](https://www.waseda.jp/inst/weekly/assets/uploads/2026/06/110d605cfac40346aad1d2df464a6586-940x705-1-1-610x457.jpg)
