藤田幸哉
Fujita Sachiya

- Posted
- Fri, 29 Nov 2024
総合機械工学専攻 修士1年生 藤田幸哉
- 派遣期間:2024年8月~11月
- 派遣先大学:エディンバラ大学
- 派遣先国・地域名:イギリス・エディンバラ
海外派遣の経緯
私が所属する研究班は, 内閣府のプロジェクトであるMOONSHOTに参加しており, そのプロジェクトには今回留学したエディンバラ大学のSethu研究室も参加しています. 昨年2月, 研究室から「Sethu研究室でのMOONSHOTプロジェクトの研究を手伝うために留学しないか」というお誘いをいただき, このたび8/20~11/22の日程でエディンバラ大学への留学の機会を頂きました.
私はもともと, AIを用いたロボットの動作生成に関する研究を行っており, 学部の卒業研究では, Dry-AIRECという人型ロボットを用いて, ハンガーにスーツをかける動作の研究を行いました. この経験がつながり, 留学先の研究室でもNEXTAGEという人型ロボットを用いた動作生成の研究に携わることになりました. 留学前から, 留学先で使用する可能性があるAIモデルの検討を行うなど, 事前準備を進めていたため, 留学中は余裕を持って研究を進めることができました.
研究内容・成果
留学先ではヒューマノイドロボットNEXTAGEによる物流タスクを対象としたインテグレーションの研究を行っていました. 研究の背景としては, まず物流において運送物の運搬や荷積み等の作業が自動化されつつありますが, 運搬や荷積みを適切に行うためには運送物の中身を把握することが重要であるものの, 必ずしも外見からでは把握できないことがあります. そこで運送物の中身の特性を動的に知覚し, それを元に運搬や荷積みの動作計画を行うことが求められています. 以上を踏まえて, 中身が分からない複数の物体(箱)を対象に, 能動的に中身の物体の特性(重さ, 安定さ)を知覚し, 特性に合わせて運搬, スタッキングをおこなう一連の動作をタスクとして設定しています. 具体的には, ヒューマノイドロボットの左手先のスティックで箱を押すことで中身の安定さを, 右手で箱を持ち上げることで中身の重さを知覚したのち, 任意に動く障害物を避けながら箱を運搬し, 最後に重く安定した箱が下にくるようスタッキングを行います. 私は一連のタスクの中でも, 画像処理周り, 主に箱を掴む際および障害物を避けながら運搬する際に必要となる, 箱と障害物の位置およびローテーション(回転)の情報の取得に関する実装を行っていました. マーカーレスでそれらの情報を取得するため, Segment Anything2およびFoundationPoseというニューラルネットワークモデルを組み合わせて実装をおこないました. この成果は11月頭に行われたMOONSHOTプロジェクトの中間報告会でのデモンストレーションに組み込まれた他, 今後の研究でも活用ができるよう, 留学先の研究室が管理するGitHubにて共有しています.

Fig.1 実験風景
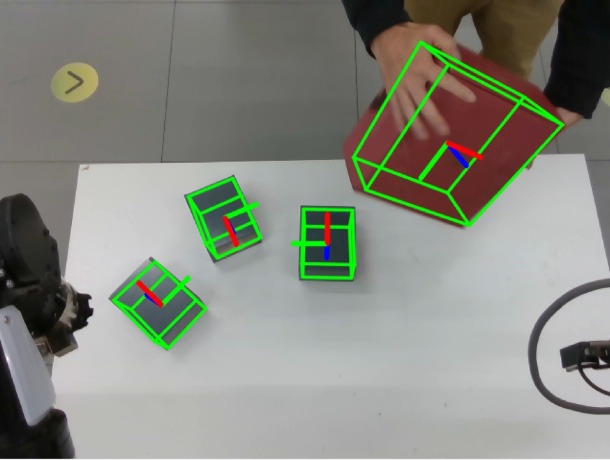
Fig.2 対象物の6D Pose(位置+回転)の取得
学校環境
エディンバラ大学のBays Centerという建物にあるラボで研究を行っていました. このビルには情報, ロボット系の研究室が集まっており, 1階にラボが, 2階以上に研究室ごとのオフィスが入っていました. ラボやセンターにおいて印象的であった点としては, 全体的に開放的な雰囲気を感じられた点です. ラボが入るセンターでは, 中心が最上階まで吹き抜けの構造をしていた他, オフィスの壁がガラス張りとなっており通路から中の様子が見える構造であったことから, 建物全体において開放感を感じられました. これは, 日照時間の短い冬期にも日光を最大限に取り入れられるための工夫だと思われますが, このような物理的側面からの開放感に影響してか, ラボのメンバーからも精神的な側面から開放感を感じることが多々ありました. 特に昼時に異なるオフィスで活動しているメンバーが自然と休息スペースに集まり, ランチをしながら会話を楽しむところに参加してみると, 不思議と自分まで開放感やゆとりを感じてしまうことがありました. 私自身せっかちな性格をしているため, 日本では根を詰めて一日中作業をするといったことが当たり前でしたが, 適度に羽を伸ばしながら研究を行う方がかえって成果がでるまでの近道になるのではないかと, ふと考えさせられるよい機会となりました.

Fig.3 Bays Centerの正面玄関.奥に活動していたラボが写っている.

Fig.4 ラボ内部の風景.ロボットアームの他に, ヒューマノイドロボットや, 移動ロボットなど複数のロボットが使用されていた.
国際交流
ここでは英語でのコミュニケーションについて触れていきます. 研究室には, ポルトガル, ギリシャ, インド, 中国など, 様々な国の出身者がおり, 日常的に多様な英語に触れる機会がありました. 留学前にイギリスのラジオを聞くなどしてリスニングの練習をしていましたが, 非ネイティブの英語を聞く機会が少なかったこともあり, 知っている単語でもなまりやイントネーションの違いにより聞き取れないことがしばしばありました. 幸い研究に関する会話をする際は, 専門用語から内容をある程度推測できた他, 相手の方が話すスピードを抑えてくれたり, 文章ごとに間を開けてくれたりと, 聞き取り安いように気遣っていただけたため, 日を追うごとに会話の内容についていけるようになり, また適切な応答ができるようになった点では成長を感じられました. 一方, 日常会話では砕けた表現が多く, 話すスピードも速いため, 会話の途中で内容についていけなくなることがあり, 話を振られてもリアクションに困ったり, 内容を聞き返す場面が多々ありました. しかし, 国際色豊かなエディンバラ人々の国民性もあり, 研究室内だけでなく街中でも「分からない」と伝えると, 多くの場合, 丁寧に対応してもらえました. この経験を通じて, エディンバラの人々の寛容さに触れるとともに, 分からないことを遠慮せずに伝えることの大切さを改めて気付かされました.

Fig.5 研究メンバーとの集合写真
住居環境
ここでは滞在場所について触れていきます. 留学中は民泊という形でエディンバラ大学から徒歩30分ほどのフラット(アパート)に滞在していました. エディンバラは歴史的景観を守るために古い建物が多く残っており, 滞在したフラットも同様に年季の入った建物でした. しかし, 暖房がシャワールームにも設置されていたり, 窓ガラスが2重となっていたりと, 冬の厳しい寒さに対応するために防寒対策がしっかりとなされていたため, 冬にかけても快適な生活を送ることが出来ました.
周辺環境
ここではエディンバラの街並みについて触れていきます. スコットランドの第二の都市であるエディンバラにはエディンバラ城やホリールード宮殿をはじめとする数多くの歴史的建造物が点在し, 中世の面影を色濃く残す街並みが現代でも残っています. この古い街並みは, 町の中心部から離れた一般住宅地域にまで及び, 多くのフラットが煉瓦造りの歴史的な外観をしています. しかし, この魅力的な景観は同時に, 方向感覚を失わせる要因にもなっています. 建物の外観が酷似していることから目印を見つけにくく, さらに三叉路や五叉路といった複雑な交差点が多いことから, 直線的に進むことが困難です. そのため, 地図を頼りにせずおおまかな方角感覚だけで歩こうとすると, 気付かぬううちに全く異なる方向へ進んでしまうことがよくありました. 私自身, エディンバラに到着して最初の1,2週間は, 大学から自分のフラットへ帰る際, 行きと同じ道を辿ろうとしても毎回のように道を間違え, 迷子になったことは苦い思い出です.

Fig. 6 エディンバラのシンボル・エディンバラ城
現地の文化
まず, スコットランドの伝統や文化について触れていきます. エディンバラで生活をしていると, スコットランドの人々が日常生活の中で自国の文化や伝統を大切にしている様子を感じ取ることができます. 特に, 以前フラットのホストの方と会話した際に, スコットランドでは山や湖を”mountain”や”lake”ではなく”ben”や”loch”と呼ぶように勧められた経験から, いかにスコットランドの人々がスコットランド固有の言葉遣いを大切にしているかということに気付かされました. また, 観光地以外の街でも民族衣装を身に纏いバグパイプ演奏している人を目にする機会があり, 伝統が単に観光客向けのパフォーマンスではなく, 生活に根付いているものであると思い知らされました. このように, スコットランドでは人々が自国の文化や伝統に強い誇りを持ち, 日常的に表現していることが感じられます. 観光資源としての価値だけでなく, 本来の生活に根ざした側面を大切にしている点は, 観光産業に力を入れている日本にとっても参考になるのではないでしょうか.

Fig.7 中心街で日頃演奏しているバグパイプの演奏者. 余談だがエディンバラ大学のサイレンの音はバグパイプの音色をベースとしていた.

Fig.8 ネス湖の風景. ネス湖はスコットランドの北部に位置しているため, ネス湖の英語名はLoch Nessと表記される.
次にスコットランドでの国民性について触れていきます. エディンバラの街を歩いていると, 建物の上に掲げられた旗が目を引きます. イギリスやスコットランドの旗も見られますが, それ以上に現在戦争が進行しているウクライナやパレスチナの旗が数多く見受けられる点が印象的でした. 特に議会や博物館といった公共性の高い建物にもこれらの旗が掲げられており, 市民の戦争に対する関心の高さと, その立場を反映しているように感じとれました. 私を含めて日本で生活していると, これらの戦争を遠く離れた地域の出来事として捉えがちですが, エディンバラでは地理的にもこれらの国々に近い上, 多様な国籍の人々が暮らしているため, 戦争への関心が高いのではないかと感じました. このような光景を目にしていると, 日本でも国民一人一人が他国の戦争に関心を寄せるきっかけとして, 旗を掲げてはどうかとふと考えてしまいます. 同時に, いつかこれらの戦争が終結し, これらの旗に代わって本来掲げられていたであろうイギリスやスコットランドの旗が再び見られるようになることを, 切に願わずにはいられませんでした.

Fig.9 青と黄でライトアップがされた橋. ウクライナの国旗に合わせた配色にしているのだろうか.
今後の目標
留学先では研究よりもデモンストレーションに向けた実装の作業が多く, いわゆる新しいアイディアを考案したりといった研究を行う機会は少なかったものの, 新しい環境で1からシステムを構築し, 既存のシステムと組み合わせるといった実装面での経験を積むことが出来た点は, 今後の研究において大いに役立つのではないかと思います. これからもMOONSHOT関連でデモンストレーションを行う機会が予定されているため, その際に留学先で経験した実装面の技術を存分に活かしていきたいです.
また, 様々なバックグランドの研究者と関わる中で, 研究分野を含めて幅広く知見を広げることが出来た一方, これまではいかに自分の考えが凝り固まっていたかということに気付かされました. これから先, 海外でまた研究を行える機会があるかわかりませんが, 日本にいる間でも積極的に海外の方とも関係を築き, 井の中の蛙とならぬよう見識を広げる努力をしていきたく思います.
おわりに
今回の留学を支援して頂いた菅野先生、尾形先生をはじめとした研究室の皆様、資金面や事務手続きにおいて支援して頂いた早稲田大学ICT・ロボット工学拠点の皆様、並びに留学を応援してくれた両親に、改めて感謝の意を表します。この経験を糧に、より一層研究に打ち込み、ロボットAI分野に貢献していきたく思います。