Upgraded WAREC-1 succeeds in traversing on mock rubble
Legged robotic platform of ImPACT Tough Robotics Challenge
https://youtu.be/OYAqfXjPIck
Being one of the most disaster-prone countries in the world, there is a high demand in Japan for robots to carry out search and rescue operations in place of humans after large-scale disasters, such as earthquakes, floods, and volcanic eruptions, as well as near wrecked infrastructure from deterioration.
Since 2014, Professor Atsuo Tananishi (Faculty of Science and Engineering) and Assistant Professor Kenji Hashimoto (Waseda Institute for Advanced Study) have worked together in collaboration with Mitsubishi Heavy Industries, Ltd., to innovate robots engaging in rescue activities. Together, they have recently developed WAREC-1 (Waseda REsCuer-No.1) under the Tough Robotics Challenge of the ImPACT Program (Impulsing Paradigm Change through Disruptive Technologies).

WAREC-1 has four seven-degree-of-freedom limbs, which allows the robot to not only move up and down ladders but crawl on either four or two legs. When standing, WAREC-1 is 1690mm tall and weighs 150 kg, and it was able to spare extra wires by employing a distributed control system. Also, the hollow-structured actuator unit allowed all the wires to fit inside the limbs to avoid damage and disconnection.
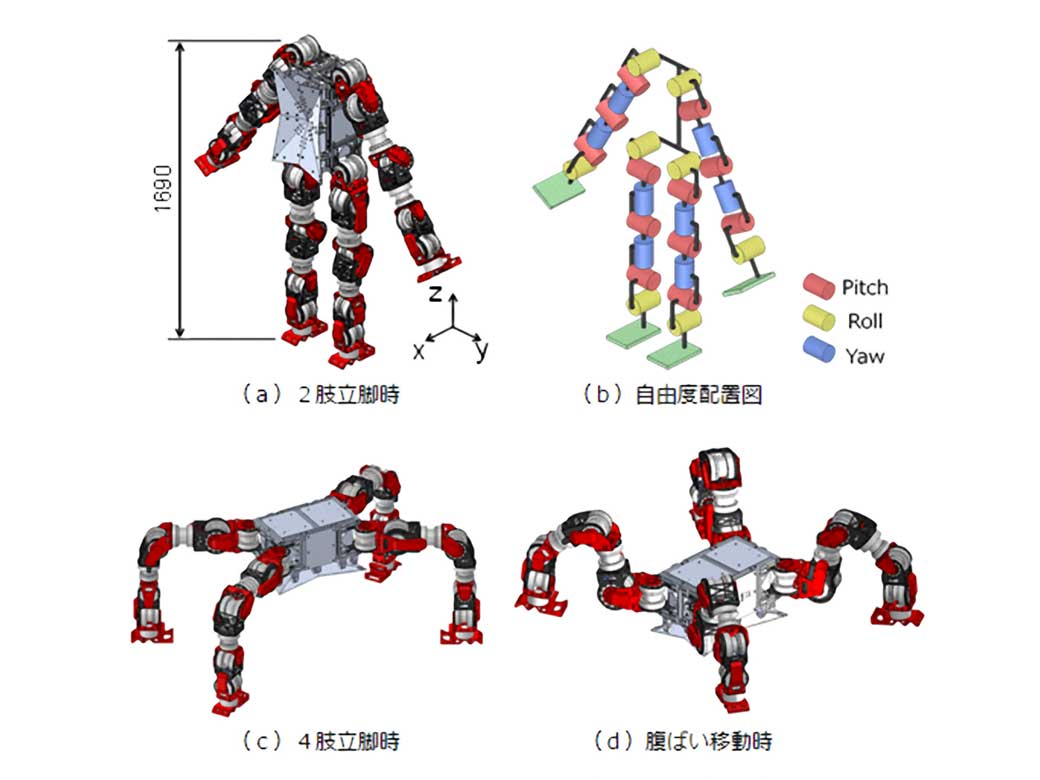
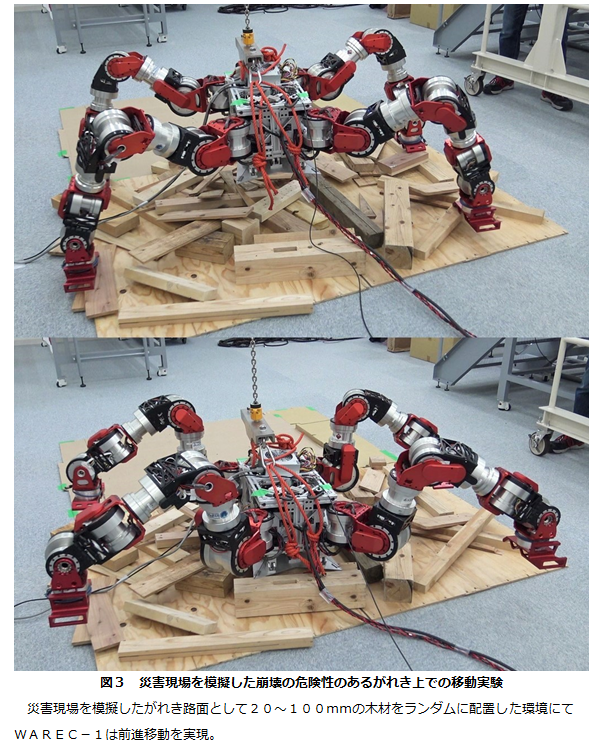
In real natural disaster environments, robots are expected to traverse over rubble with possibilities of collapse, yet this has been considered difficult since the sensors on the limbs must precisely detect of where it will take steps on an uneven surface. Moreover, WAREC-1 was unstable during a four and two-legged movements due the robot’s height and its imbalance with the center of gravity. The team addressed these issues by designing a robust robot to creep on its stomach.
Currently, WAREC-1 is powered by electricity from an outside source, but this will be replaced with batteries in the future. The team plans on studying leg movements for improving mobility and installing sensors for environmental recognition on the limbs to collect information and assess the situation at the site before taking steps.
WAREC-1 is a legged-robotic platform for ImPACT Tough Robotics Challenge. The program aims to merge technologies used in WAREC 1 with others such as remote control systems, image processing, and sound processing to develop robots for conducting activities on dangerous and hazardous grounds. Also, the hooks on WAREC-1 are to be replaced with arms so that it can perform physical, highly dexterous tasks using tools.
Related Video and Links

Octopus
A remote controlled four-armed, four-wheeled crawler robot designed to clear rubble and save lives in areas with complex terrain designated no-go zone during the nuclear disaster crisis. Read the full article here

WAREC-1 climbing a ladder
The goal of this bipedal robot is to function autonomously during large-scale natural disasters and assist building safety inspections in places such as power plants for disaster prevention. Read the full article here