日々の新たな気付きがモチベーションにつながる
大学院基幹理工学研究科 修士課程 2年 柳田 強(やなぎた・つよし)

私が所属する吉村浩明(理工学術院教授)研究室では、非線形システムのモデリング、ダイナミクスと制御について、数理的なアプローチを基礎として、理論研究だけでなく、応用・実験的な研究を行っています。その中でも私は、「倒立二輪ロボット」と呼ばれる、セグウェイのようなロボットの制御について研究しています。学部生のとき、機械系の学科に所属していましたが、数学にも興味があったため、数理的な研究を行うこの研究室に関心を持ちました。それに加え、理論だけでなく実験にも挑戦したい気持ちがあったので、比較的手軽に実験ができる倒立二輪ロボットに関する研究をしようと考えました。
このロボットは、止まっている状態では立たせることができない点が特徴です。自動車と違って、自転車はスタンドなどの支えがないと駐輪できません。それと同じ原理です。走行させる際も、バランスを取ってロボットを立たせながらでないと移動できません。皆さんは普段、何気なく自転車を運転していると思いますが、無意識に自転車が倒れないようにバランスを取りながら走行しているはずです。これを人の手を加えず、自動でコントロールさせることは、なかなか難しいことなのです。
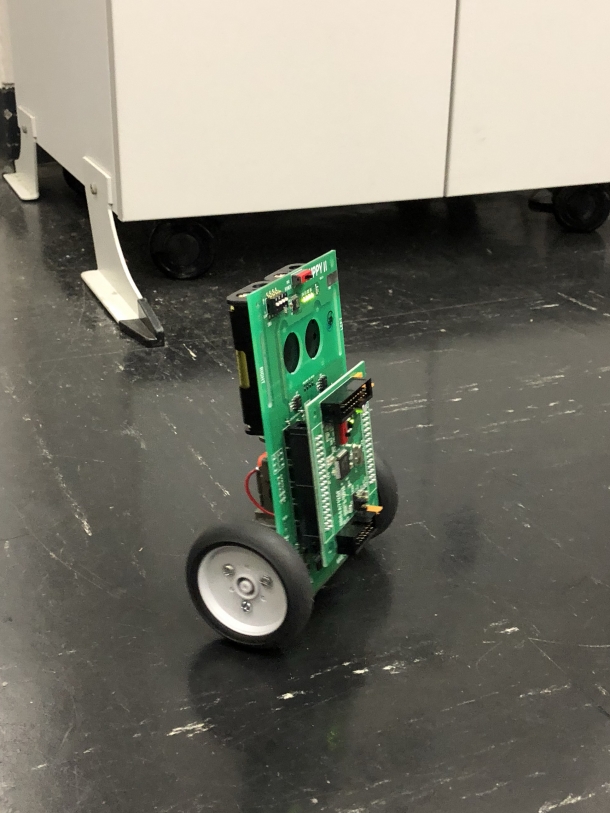
実験で使用している倒立二輪ロボット(株式会社北斗電子「PUPPYⅡ」)
さらに言えば、この倒立二輪ロボットには自転車のハンドルに当たるものがありません。左右の車輪をうまく回転させ、ロボットを立たせた状態にキープしたまま移動する必要があります。つまり、車輪を回転させることで、ロボットの軌跡(どのような経路で走行するか)だけでなく、姿勢(どれだけ傾いているか)も制御しなければなりません。このようなロボットは劣駆動系と呼ばれており、駆動装置(ロボットを動かす装置)が少ない分、コストを抑えられる、軽い、壊れにくいなどの利点があります。しかし、非線形性が強く、制御が難しいという欠点もあります。
非線形性とは、簡単に言えば比例していない状態を意味しています。皆さんも一度は、日経平均株価などの株価の推移を表す折れ線グラフを見たことがあるかと思います。10分後に株価が10円上がったからといって、20分後には20円上がるとは限りませんよね。このように、比例していない状態のことを非線形と呼びます。倒立二輪ロボットもこれと同じで、傾いている角度によって、立たせるために必要な力などの特性が大きく変化します。このような性質を持つロボットの軌道を制御する方法は、いまだ確立していません。そこで私は、論文などを読み考察を深めるだけでなく、ロボットを用いた実験を行い、非線形性に対して有効な新しい制御の方法について研究しています。
実験では、新しい制御の方法を用いてプログラムを作成・変更し、ロボットに組み込みます。その後ロボットを実際に動かすと、移動した軌跡がデータとして得られます。その軌跡が理論通りになっているか、誤差はどのくらいかを調べることで、制御手法の有用性を検証します。また、直線や円、八の字などさまざまな軌道を描かせ、どのような違いが生まれるかという研究もしています。
この研究は将来、人が作業できないような、事故現場や宇宙空間などで活躍するロボットに活用できると考えています。そのような環境下ではロボットを自動でかつ精密に制御する必要があるため、非線形性を考慮した制御が確立すれば、災害時の救助や月面探査などでの活躍の可能性が広がるのではないでしょうか。

菅平セミナーハウスで行った、機械科学専攻の4研究室合同スポーツ大会にて、吉村研究室のメンバーと(筆者は右から4人目)
私は、毎日何か発見があることに、研究活動のやりがいを感じます。研究の成果がすぐに出るわけではありませんが、後輩とのミーティングを経て新たな考えが生まれることもありますし、違う分野の研究をしている研究室の同期の話からヒントを見いだすこともあります。このように、知らないものや考えに触れ、新しい気付きを得ることが、モチベーションになると考えます。今後も見知らぬ世界に飛び込み、幅広く経験できるような環境で過ごしていきたいです。
ある日のスケジュール

研究室にある筆者のデスク
- 05:00 起床
- 06:00 最寄り駅のカフェでアルバイト
- 11:00 研究室着。メールチェックや事務作業など
- 13:00 昼食。同期と時間が合うときは西早稲田近辺の油そばを食べに行くことも
- 14:00 研究班の後輩とミーティング
- 16:00 自分の研究。論文を読んだり、実験をしたりと日によって内容はさまざま
- 19:00 研究室の仲間や大学の友人と飲み会
- 23:00 帰宅
- 24:00 就寝

プライベートで訪れた伊豆の城ヶ崎海岸にて