-

- 高西 淳夫 教授
-

- 石井 裕之 次席研究員
理工学術院 教授 高西 淳夫(たかにし・あつお)
早稲田大学理工学部卒業、同大学院理工学研究科博士課程修了。工学博士。専門はロボット工学。早稲田大学ヒューマノイド研究所所長。2014年度日本ロボット学会副会長。
理工学研究所 次席研究員 石井 裕之(いしい・ひろゆき)
早稲田大学理工学部卒業、同大学院理工学研究科博士課程修了。博士(工学)。専門はロボット工学
ロボット技術を応用して開発された手術訓練ができる装置。縫合手技の技術評価を行い、医療ミスの低減に貢献する。
研究・開発の目的
高西研究室では、人体模型の製造で有名な株式会社京都科学と共同で、手技を評価することが可能な医学教育シミュレータの開発に取り組んでいる。ここでは、その一つである縫合手技評価シミュレータ(以下、縫合シミュレータ)について紹介する。
時代背景、社会のニーズ
医学部や大学病院などの医療教育機関では、医学生や研修医を対象としてさまざまな医療手技の訓練が行われている。例えば、ウレタンなどの樹脂製シートに模擬切創が設けられた皮膚模型を使った皮膚縫合の訓練などである。これらの模型は医学教育シミュレータと呼ばれ、医療の安全を実現する上で重要な役割を果たしている。
しかしながら、既存の医学教育シミュレータには、手技訓練においてもっとも重要である、手技を評価する機能がない。医療手技に限らず、あらゆる技能訓練の場面では、技能を評価し、その良しあしを訓練者に提示することが必要不可欠である。

力センサと小型カメラが搭載される縫合手技評価シミュレーター
当該研究の特色、独自性
私たちが開発している縫合シミュレータでは、力センサと小型カメラを用いて手技の評価を試みている。シミュレータ内部には光学式距離センサを応用した力センサが埋め込まれており、縫合を行う際の皮膚部に加えられた力の大きさと向きの計測が可能になっている。また、模擬切創付近を撮影するための小型カメラも搭載されており、縫合終了時の切創周辺を撮影し、画像処理によって創の状態の計測が可能となっている。
縫合シミュレータでは、これらのセンサから得られた計測値をもとに、時間、縫合力、創閉鎖など6項目について得点を算出する。得点は、センサの計測値を、さまざまな手技水準の被験者のデータが記録されたデータベースと照合し、熟練医を100 点、医学生を0点とした際の相対評価で算出される。また総合得点として、6項目の得点に重要度に応じた重みを乗じたものの総和を算出する。
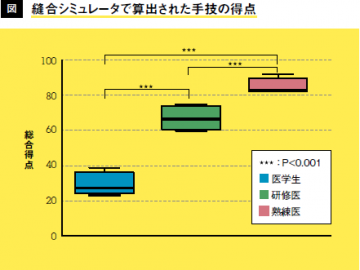
現時点での成果
複数の大学病院の協力の下、開発した縫合シミュレータの実証実験を行った。実験では、熟練医、研修医、医学生に縫合シミュレータに対して縫合を行ってもらい、総合得点を比較した。その結果はグラフに示すとおりで、手技水準の差が総合得点の差に表れていることが見て取れる。この結果から、縫合シミュレータの手技評価の妥当性が確認されたと考えている。
この結果を踏まえ、縫合シミュレータは、前述の京都科学によって製品化され、現在、国内外の医療教育機関で実際の訓練に使用されている。
課題と展望
高西研究室では、医学教育シミュレータの開発以外にも、2足歩行ヒューマノイドなど、さまざまな形態のロボットの開発を手掛けている。現在、これらの技術を統合することで、人間と同じように医師からの問診に答え、口を開けたり深呼吸を行ったりすることが可能な患者ロボットの開発に取り組んでいる。今後、これらの開発を通して、安全な医療の発展に貢献していきたい。
(『新鐘』No.81掲載記事より)
※記事の内容、教員の職位などは取材当時のものです。