遠隔操作での妊婦検査を可能にするロボットは、大きくなる腹部形状にも適応できる安全設計です。

理工学術院 教授 岩田 浩康(いわた・ひろやす)
早稲田大学理工学部卒業、早稲田大学大学院理工学研究科博士後期課程修了。博士(工学)。専門は高齢者や障がい者を支援するヒューマン・ロボティクス。これまでに家事・介助を手伝えるヒトサイズの人間共存ロボットTWENDY-ONEを世界に先駆けて開発。2014年度には初代早稲田リサーチアワードを受賞。
周産期医療の現状と未来イメージ
産科医不足が叫ばれる一方で、少子化も相まって、産婦人科施設数も減少している(昭和62年の9000施設から平成20年には約40%減)。施設数が少ない地域ほど一つの病院に妊婦が集中するため、待ち時間が長い一方で、一人の妊婦にかけられる診察時間が短く、妊婦の負担は増大している。産科医療施設の不足は地方に限らず、埼玉・神奈川・千葉など東京周辺の医療過疎地域においても重大な問題となっている。これを踏まえ、私の研究グループでは、遠隔操作で超音波エコー検査を行える妊婦検査ロボットを開発し、それを用いて新たな遠隔医療サービスを提供することを目指している。ロボットには遠隔操作と自動走査の2つの機能が備わっている。遠隔操作モードを使えば、タブレット端末から遠隔操作で超音波プローブの位置と角度を腹部上で自由に動かせるため、医師は遠隔地にいながら胎児の発育状態(体重や羊水量の推定、心拍の異常、逆子状態か否かなど)をチェックできる。
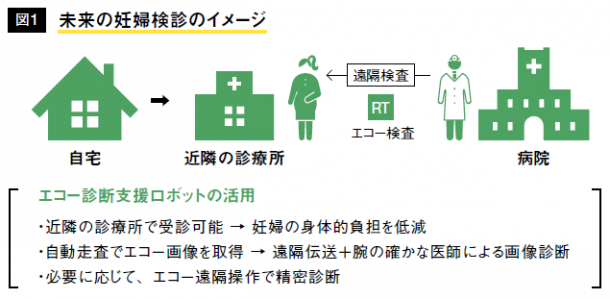
一方、自動走査モードの利用イメージは以下のとおりである。妊婦が家の近くの診療所に行くと、ロボットが決められた動きで超音波エコー映像を取得し、クラウドサーバーにデータが保存される。遠隔地の医師は、時間のあるときにエコー映像をチェックし、タブレット端末を通じて、診断結果を妊婦に伝えればよい(時間や空間の制約を受けない)。ロボットを使えば、妊婦と医師双方の負担を減らせる未来医療サービスが提供できるかもしれないのだ(図1)。
妊婦の安全に配慮したロボット設計
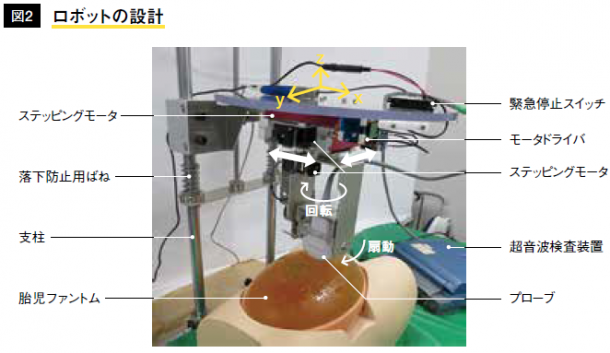
そこでキーとなるのが、超音波プローブを動かすロボットの設計である。そのポイントは3つに集約される。①子宮上でプローブ位置・角度を調整可能、②腹部の形状変化に適用可能な機構、③妊婦に負担をかけない接触力。つまり、妊婦の安全確保に最大限配慮したロボット設計が求められるわけだ。①では、全4自由度とし、2つのモータで頭尾・左右方向に移動させ、別の2つのモータでプローブを任意の方向に回転させることで、胎児がいる子宮全体のエコー映像を取得できる仕組みを考案した(図2)。
変化する腹部形状への対応
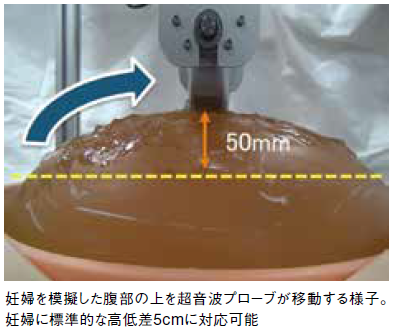
ところで、妊婦の腹部は、週数が増すと、前方に大きく突き出す。②と③を考える上で、この点は重要である。その高低差は、36週ごろにピークを迎え、4~12㎝ほどに達する。こうした高低差に対しても、適切なエコー映像を取得するためには、ロボット駆動中にプローブが腹部と安全に接触し続ける必要がある。そこでまず、産科医に協力していただき、プローブを妊婦の腹部上で動かしているときの接触力をセンサで計測した。その結果、最大1㎏程度の押し付け力であることが分かり、これを目標に設定することとした。
その実現方法として、一般的には、センサで接触力を計測し、1㎏を超えないように制御する方法が用いられる。ところが、センサの故障や制御の不具合が生じた場合、過剰な接触力を妊婦に与える恐れが生ずる。そこで、僕らは、この問題を機構の工夫で解決することとした。まずは、モータやモータドライバ、構造部材の重量が妊婦の腹部に一切かからず、かつ妊婦がロボットの下部に入り込みやすいよう、片持ちの支柱で全荷重を受ける構造を採用した。さらに、接触力が小さすぎると、エコー映像の鮮明さが低下することから、接触力と画像の鮮明さの関係を調べ、最適な接触力600グラムを維持するよう機構設計を施した。タネを明かせば簡単で、プローブの両側をリニアガイドで低摩擦に支持し、上下方向に移動自由にした。このような工夫により、妊婦の安全確保を担保しつつ、子宮上方の頭尾・左右方向に対しプローブを自由に動かせるロボットが完成したのである。
妊婦での実証
「ロボットをつくっても実際に使えなければ意味がない」を合言葉に、岩田研では「ロボットの実学探求」を行っている。このプロジェクトでも、2014年夏から秋にかけて、妊婦2名の協力を得て、世界で初めて超音波検査ロボットを妊婦の腹部上で駆動させる試験を行った(写真1)。実験開始後、いきなり胎児が元気よく両足をバタバタさせている映像が飛び込んできた。さらに、19週の小さな胎児の心臓が勢いよく拍動している映像が映し出されたときにはボルテージも最高潮に達した。学生メンバーからも「おぉ~、すご~い!」と歓喜の声が上がるなど、それまでの苦労が報われる瞬間だ。考案した機構のおかげで、5㎝の高低差も無事に乗り越えられることも確かめられ、創造のためには想像することが大切であることを再認識した。
写真1 世界初となる妊婦でのロボット実証試験
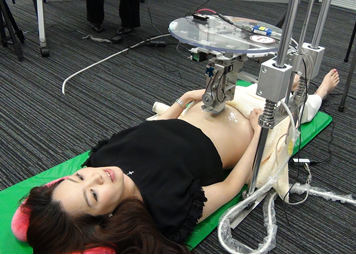
ロボットで妊婦の腹部を自動走査中

ロボットを通じて映し出された胎児(19週)の様子。顔の側面(左上方を向いている)や背骨(白い線)が見える
情報処理とロボット技術の融合が鍵
この妊婦超音波検査ロボットには、神奈川県が熱視線を寄せてくれており、「さがみロボット産業特区」の重点プロジェクトの一つに採択されることとなった。2015年度からは、県内の産婦人科病院の医師と連携し、多くの妊婦での実証を目指す。同時に、画像処理技法を用いて、ロボットで撮像されたエコー映像を解析し、自動的に胎児の体重や羊水量を計測し、発育異常の自動抽出が可能なアルゴリズム開発にも取り組む。これらは、待ち時間の大幅な短縮や医師の技能差に起因する異常状態の見逃し防止にもつながる。
このように、情報処理とロボット技術が融合することで、周産期医療の質的改善や新医療サービスの創出など新たな展開がおおいに期待される。異分野融合による創造知、これこそがイノベーションの鍵となろう。
-

- 写真①
-

- 写真②
-

- 写真③
写真①:学部生や大学院生と知恵を出し合いながら、開発・実験は進められてゆく
写真②:ロボットを頭尾方向に自動走査したときに撮影された胎児ファントム(胎児の人形が入った疑似腹部)の連続断層写真
写真③:ロボットを用いた遠隔妊娠検査のイメージ。妊婦はタブレットを通じて、遠隔地にいる医師と話しながら、エコー映像を確認したり、検査を受けられる
(『新鐘』No.81掲載記事より)
※記事の内容、教員の職位などは取材当時(2014年)のものです。